Los Motores: Corriente Continua y Puente H de la Universidad Tecnológica de Pereira
Diapositivas de la Universidad Tecnológica de Pereira sobre Los Motores. El Pdf, un recurso de Tecnología para estudiantes universitarios, explica los motores eléctricos, con foco en los de corriente continua con escobillas, la inversión del sentido de giro y el puente H.
Ver más28 páginas

Visualiza gratis el PDF completo
Regístrate para acceder al documento completo y transformarlo con la IA.
Vista previa
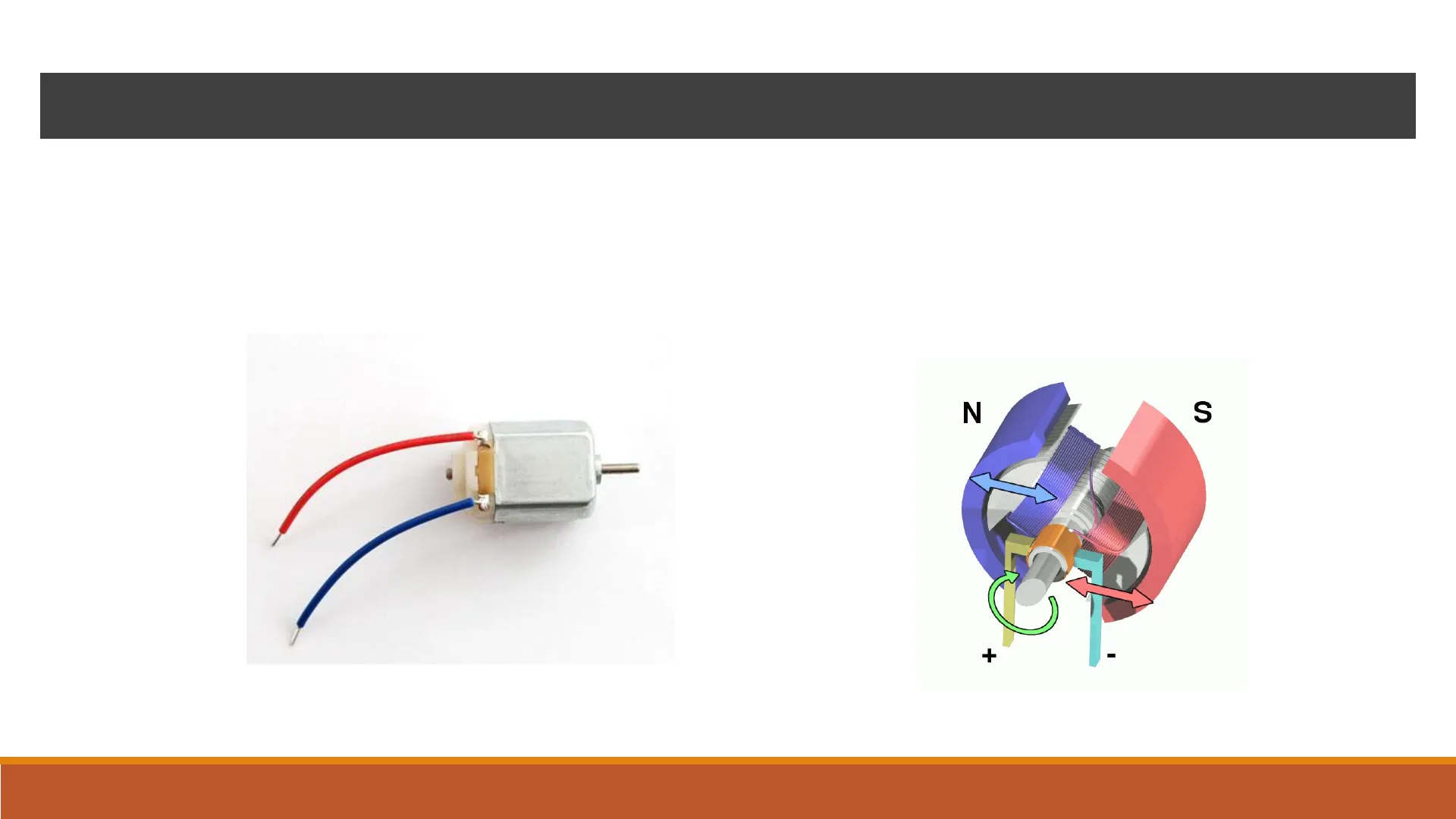
Motores de Corriente Continua
; MOTOR SERVO 2 12 SO = 8+ 12 n H3 18 3 H 15 + + H = 1. = 3 1 3 conte corqiutic contro nemhitos phase intonts - stepper motor Los Motores PHD JIMMY ALEXANDER CORTÉS OSORIO UNIVERSIDAD TECNOLÓGICA DE PEREIRA 30 C HV 3 + 12 A 6Motores de corriente continua con escobillas
- Requieren de conmutadores rotativos para generar el campo magnético adecuado.
- La velocidad depende generalmente de la tensión aplicada. N S +Control de motores de corriente continua: PWM V+ V average 0 v V+ V average 0 v -t V+ -V average 0 v -t +- pulse width ++ period SEÑAL PWM La anchura del pulso modifica el valor medio de la tensión de la señal
Inversión del sentido de giro y frenado
- Para invertir sentido el giro hay que invertir la polaridad . El motor puede tener frenado pasivo, reostático o regenerativo
- Al desconectar un motor, colapsa el campo magnético de las bobinas y se produce un pico de tensión de polaridad opuesta
- No debe cambiarse bruscamente el sentido de giro de un motor cargado, es mejor frenarlo primero
El Puente en H
. Consiste en 4 interruptores conectados en parejas · Permite controlar la velocidad, invertir el giro y frenar el motor 1+12V S:1 S3 Motor 0 S2 S4 Ground H-Bridge Switch Switches Closed Motor S1 S3 Off S2 S4 Off S1 S4 Forward S3 S2 Reverse5V Q3 Izquierda R1 Q1 2N3904 R4 0 2k D2 1N4007 D3 1N4007 2k 2N3904 0 0 STOP 0 1 IZQ 1 0 DER 1 1 NO VALIDO Q4 00 R2 Q2 2N3904 D1 1N4007 D4 1N4007 R3 0 2k 2k Derecha 2N3904 1Puente en H: el L293XX Existen varios chips que pueden suministrar más o menos potencia, a la vez de tener otras características similares
Driver L293D
- Consta de 4 entradas y 4 salidas + 2 ENABLE
- Cada ENABLE activa uno de los puentes
- Las entradas controlan las salidas según tabla. Vcc2 O 2 × SES5001 IMI 2 × SES5001 2A 1A -0 7 6 3 2 16 -O VCC1 8 1/2 L293 1 EN 4, 5, 12, 13 GND EN 1A 2A FUNCTION H L H Turn right H H L Turn left H L L Fast motor stop H H H Fast motor stop L X X Fast motor stop L = low, H = high, X = don't care L293D / 9907X VW SI @ MYS 99 918
Esquema de conexión del L293D
+5V ENABLE-1 1 16 A INPUT1 2 15 INPUT4 OUTPUT1 3 14 OUTPUT4. GND 4 13 GND- MOTOR MOTOR GND 5 L293D 12 GND. OUTPUT2 6 11 OUTPUT3- B INPUT2 7 10 INPUT3 VS 8 9 ENABLE2 + This GND Must also be connected to MCUs GND Motor Supply Equal to Rating of Motors Used Motor Controller Using L293D Copyright eXtremeElectronics.co.in Dual DC Motor Controller VSSFuncionamiento Básico Motor DC VOC VOC SWA SW-SPOT 0.00 SWB 16 B SW-SPOT 78 VSS VS OUT! OUT2 6 15 14 SWC 0 L293D SW-SPDT € SWD A SW-SPOT SWE1 -0 M SW-SPOT SWE2 . SW-SPDT L298N Salida Motor A C UT 25V 330 Salida Motor B 25V 330 CH INI IN2 IN3 IN1 FOR Jumper regulador Entradas IN1 a IN4 ENB: Jumper Activación Motor B Vin GND V lógico ENA: Jumper Activación Motor A ICL END IN3 IN4 OUT3 GND GND OUT4 3 IN1 IN2 EN U?IN4 ENI IN2 L298N H-Bridge IN1 +5V GND +12V Motor DC
Motores Paso a Paso
- Ideales para la construcción de mecanismos en donde se requieren movimientos muy precisos
- Conmutando secuencialmente las bobinas se hacen girar. IN1 IN2 1N3 1N+ IN5 IN6 IN7 X113617 5-12V R5 R6R7R8 Motores paso a paso
- Pueden quedarse fijos en una posición. en grados.
Motores paso a paso Bipolar
Estos tienen generalmente cuatro cables de salida. Necesitan ciertos trucos para ser controlados, debido a que requieren del cambio de dirección del flujo de corriente a través de las bobinas en la secuencia apropiada para realizar un movimiento. Stepper Motor Supply +5V U2 9 1 16 BI-POLAR MOTOR STEPPER 2 IN1 VS EN2 EN1 VSS OUT1 6 Controller Pin 2 IN2 OUT2 10 IN3 OUT3 Controller Pin 4 OUT4 A 25 2 4 GND GND GND GND 4 5 12 13 C D MG1 11 Controller Pin 3 15 IN4 3 Controller Pin 1 7 14 B L293D
Motores paso a paso Bipolar - Secuencia
PASO TERMINALES A B C D 1 +V -V +V -V 2 +V -V -V +V 3 -V +V -V +V 4 -V +V +V -V
Motores paso a paso Unipolar
Estos motores suelen tener 6 o 5 cables de salida, dependiendo de su conexión interna (ver figura 2). Este tipo se caracteriza por ser más simple de controlar. +12V +5V +12V U1 16 1 9 2 3 1 Controller Pin 1 IN1 VS EN1 EN2 OUT1 6 2 Controller Pin 2 IN2 OUT2 11 Controller Pin 3 IN3 OUT3 Controller Pin 4 15 IN4 OUT4 5 12V MOTOR STEPPER GND GND GND GND 5 12 C L293D 13 B D 3 14 A 4 MG1 B VSS 7 10
Motores paso a paso Unipolar - Secuencia
Secuencia Norma PASO Bobina A Bobina B Bobina C Bobina D A 1 ON ON OFF OFF = B D JA 2 OFF ON ON OFF B D A 3 OFF OFF ON ON B D C IA 4 ON OFF OFF ON B D c B D C Secuencia Wave drive PASO Bobina A Bobina B Bobina C Bobina D IA 1 ON OFF OFF OFF B D C A 2 OFF ON OFF OFF C A 3 OFF OFF ON OFF B C A 4 OFF OFF OFF ON B D A B D CMotores paso a paso Unipolar - Secuencia PASO Bobina A Bobina B Bobina C Bobina D 1 ON OFF OFF OFF B A 2 ON ON OFF OFF B 3 OFF ON OFF OFF B 4 OFF ON ON OFF B 5 OFF OFF ON OFF B A 6 OFF OFF ON ON B D A 7 OFF OFF OFF ON B D A 8 ON OFF OFF ON B D Secuencia del tipo medio paso: A B D CFuncionamiento Básico Step Motor SWE SW-SPDT 4 4 SWA SWB SW-SPDT SW-SPDT 4 0.00 4 SWC SWD SW-SPDT SWF SW-SPDT SW-SPDT C D O + on/off ULN2003APG . 5 - 12V IN5 IN6 IN7 2VZ CAK 590 531 DO 015 22 DV RX2 TX2 05 Dl8 019 321 RXO TXD D22 023 I BOOT I I I I RandomNerdTutorials.comn CP2102 Wi Fi EN N3 dA NA MEG SEG ZEG EED 524 924 221 NIE210 ETE 215 EOS QU) EN5 *189 volt battery 100 uf www.microcontroller-project.com A4988 ENABLE CVMOT MS1 ONB MS2 - MS3 ZA RESET 5 .... TD STEP DID GND DO D1 D2 D3 D4 3V3 GND D5 Db D7 D8 RX TX GND 3V3 AYARAFUN FLASH Wi Fi I AM1117 MODEL ESP8266MOD SILABS VENDOR AI/THINKER CP2102 ISM 2.4GHz PA +25dBm FC 802.11b/g/n RST OY ASY ASH ECS 24S Tas aW) DES X1) AND EAE N3 ISH END VIA
Controlador de motores paso a paso A4988
Este controlador de motores paso a paso está basado en el chip A4988 de Allegro, el cual soporta microsteping para motores bipolares. Puede proporcionar hasta 2A por bobinado y opera desde 8 a 35V. Tienes salidas auto reguladas de 5V y 3,3V para alimentar la lógica externa sin necesita de un regulador adicional, lo cual lo hace extremadamente sencillo de manejar. Con tan sólo dos pines (dirección y pulso), podrás controlar facilmente un motor paso a paso bipolar. Características: Control simple de dirección y paso Cinco resoluciones diferentes: paso completo, medio paso, un cuarto de paso, un octavo de paso, y un dieciseisavo de paso. Corriente de salida ajustable mediante un potenciómetro para establecer el máximo aplicado al motor. Control inteligente que selecciona automáticamente la corriente decay (fast decay y slow decay) Protección de temperatura, sobre voltaje y protección crossover-current motor power supply (8-35V) MS1,MS2,MS3 STEP DIR VDD, VMOT GND RST SLP 1A,1B,2A,2B EN - VMOT MS1 GND MS1 GND MS2 2B O 6 2B MS3 2A O S1- 82 2A microcontroller SLEEP 1B RST 01A HRZ3F 498850 S2"á GND ·DIR GND O STEP VDD O DIR STEP EN 30374 RI DIR GND logic power supply (3-5.5V) A4988 Motor Driver PINOUT YWASZ MSORSTLIDIESES C2 C5 O VDD Ľ -RESET 1A 1A STEP VDD SLP 1B REAARSA PR A1988 C1 810 R3 GND A4988 + ENABLE VMOT 100 µF EN O R2 MS2 MS3 CIRCUIT DIGEST Driver A4988
Servomotor
- Es un motor eléctrico de cualquier tipo con realimentación de posición.
- Mediante un sistema de control específico, pueden quedarse fijos en cualquier posición angular y mantenerla.
- Suelen consistir en un motor, una caja reductora acoplada a un potenciómetro, y un circuito de control.
- Normalmente se les aplica pulsos cuya duración es proporcional a la posición deseada.
Características del Servomotor
1ms - 0° 1,5ms 1 90° 2ms 180° 200ms Futaba Connector HITEC JR AIRTRONICS non-"Z" Get The Advantage Red (+) Black (-) Red (+) Black (-) Red (+) +Black (-) Black (-) Black & White (Signal) White (Signal) Yellow (Signal) Orange (Signal) Red (+) Colores habituales de los cables1 TOS OSCL Pos: 0 ESP32 ..... vCC UFuncionamiento Básico Motor Servo 5 Hz hasta -90 Grados VSM Signal Generator Hz KHZ mv O 5 6 7 0.1 1 5 6 7 10 0.1 8 10 10 4 Centre Range Level Range 9 Waveform 9 3 \ 1 0. 10 2 2 0.1 1 11 11 1 Bi 0 5.00 Frequency 0 10.1 12 Amplitude p-p Polarity 2 Hz hasta +90 Grados 2272 . 10 2 . Un MHZ 1 12 3 1 1 -90.0 4 . AM 8Servomotor Naranja (4) M ROHR STEP MOTOR 28BYJ-48 5V DC 74022300 Rosa (2) Rojo +5V Amarillo (3) Azul (1) Secuencia de conmutación de Medio Paso Número y color de pata -> Dirección de la agujas del reloj (fases 1-2) 1 2 3 4 5 6 7 8 (4) Naranja . . (3) Amarillo . . . (2) Rosa . . (1) Azul . .0 steps VIN GND D13 D12 D14 027 025 025 033 032 035 034 VN VP EN ESP32 3V3 GND D15 D2 D4 RX2 TX2 D5 D18 D19 D21 RXD TXD D22 023
Referencias
- Todo Robot | La web de Android, 'Tutorial sobre Motores Paso a Paso (Stepper motors)', 2014. [Online]. Available: http://www.todorobot.com.ar/tutorial-sobre-motores-paso-a-paso-stepper-motors/. [Accessed: 23- Oct- 2015].
- Commons.wikimedia.org, 'File:Electric motor.gif - Wikimedia Commons', 2008. [Online]. Available: https://commons.wikimedia.org/wiki/File:Electric_motor.gif. [Accessed: 23- Oct- 2015].
¿Non has encontrado lo que buscabas?
Explora otros temas en la Algor library o crea directamente tus materiales con la IA.
