Trasformata di Radon e retroproiezione filtrata in Ingegneria Biomedica
Documento da Corso di Laurea Magistrale in Ingegneria Biomedica su Trasformata di Radon. Il Pdf esplora la trasformata di Radon e la retroproiezione filtrata (FBP), concetti fondamentali nell'elaborazione di immagini biomediche per il corso di Fisica all'Università.
Mostra di più45 pagine

Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
Elaborazione di Segnali e Immagini Biomediche
Trasformata di Radon
I sistemi TC odierni usano, di solito, un fascio a ventaglio ma risulta più didattico introdurre la ricostruzione delle immagini TC basate su geometria del tipo fascio a matita in cui, per ogni direzione di proiezione, il fascio di raggi X è collimato a forma di matita e mosso linearmente in direzione parallela all'array di detettori lineari di raggi X.
Prima di descrivere la tecnica di ricostruzione di una immagine a partire dai dati tomografici, è utile formalizzare alcune definizioni.
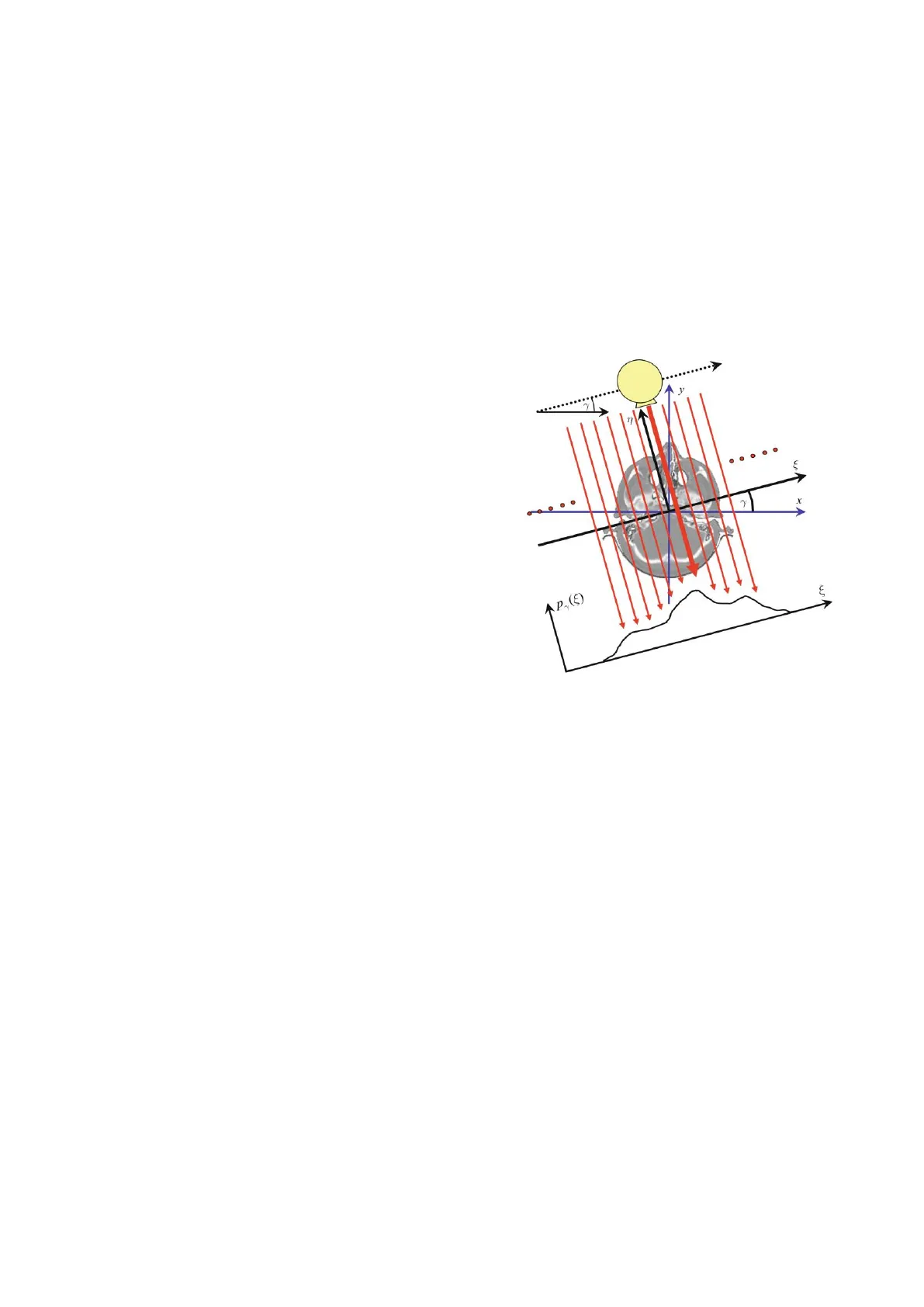
In genere, si considera che il volume corporeo, di cui si vuole ricostruire l'immagine di una sua sezione sia centrato nel sistema di coordinate (x,y) mentre il tubo radiogeno e il rivelatore (insieme di detettori) siano organizzati in un sistema di riferimento di coordinate (§,n), con stessa origine ma ruotato di un angolo y rispetto al sistema (x,y). Queste coordinate corrispondono alla coppia (t,s) della rappresentazione utilizzata precedentemente per descrivere la retta nel piano.
Nell'esempio di figura 1, la coordinata ¿ rappresenta, nel sistema ruotato (§,n), la giacitura della retta su cui si trovano i detettori e n il percorso della radiazione. Siano ng e nn i versori che individuano gli assi šen, per quanto detto nei paragrafi precedenti, dove i versori sono stati indicati con w e @:
2 x 2 Ap,(§) di Figura 1: Geometria del processo ricostruzione dell'immagine tomografica
ng = @(y) = (cos(y), sin(y)) nn=@(y) =(-sin(y), cos(y))
Le trasformazioni (unitarie) di coordinate che consentono il passaggio da un sistema di riferimento all'altro, sono date da:
in -siny cosy siny cosy] Mely] = siny [cosy -siny] cosy In [{] (1) 76Corso di Laurea Magistrale in Ingegneria Biomedica Elaborazione dii Segnali e Immagini Biomediche ParteIII
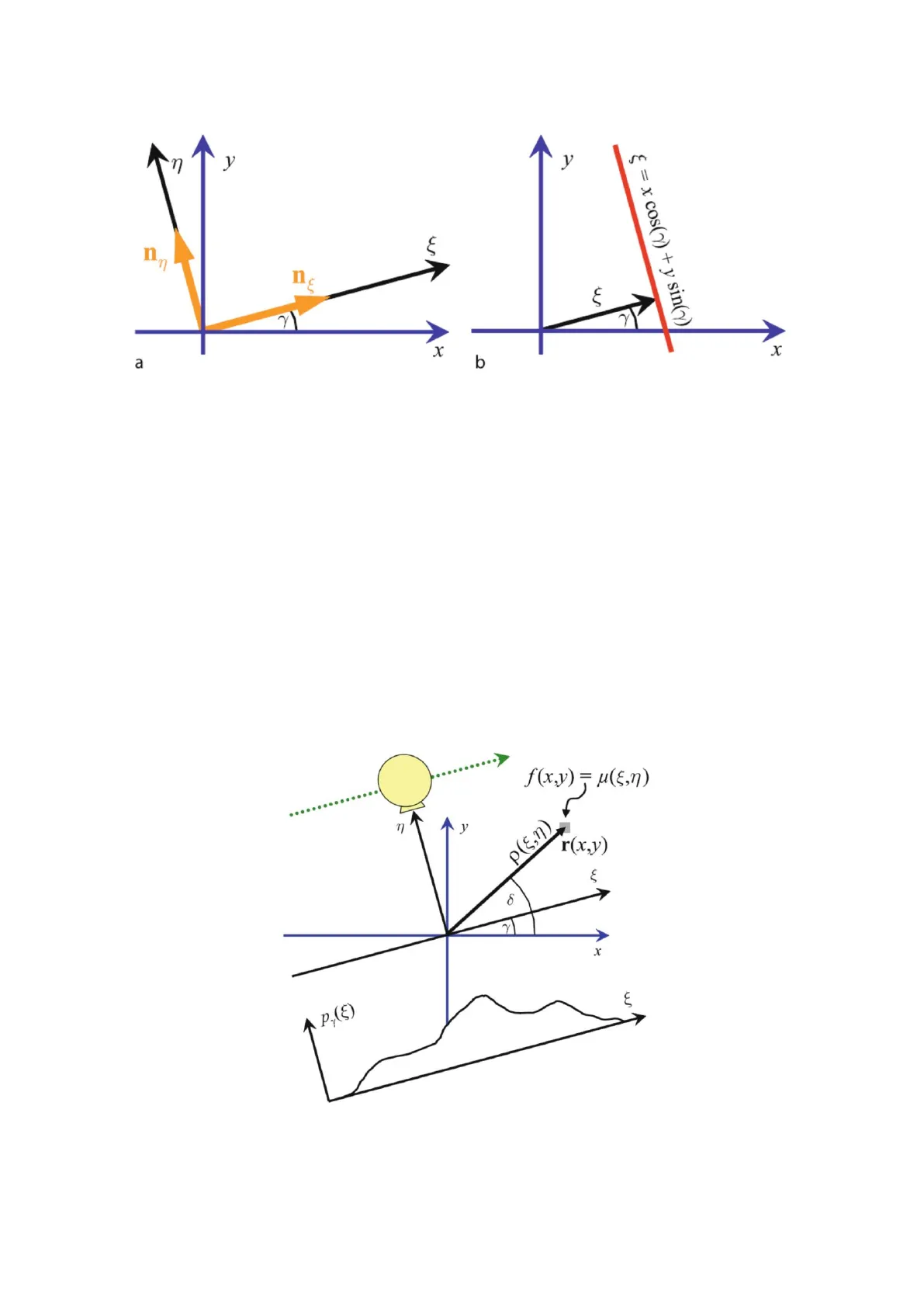
y y n ng $ = x cos(2) + y sin(?) x x a b Figura 2: definizione del sistema di proiezione (¿,n) attraverso i versori n; e nn. Il sistema di coordinate fisse (x,y) rappresenta il sistema di coordinate del paziente a riposo. La linea di proiezione che attraversa l'oggetto è data nella sua forma Hessiana.
Si possono scrivere per ¿ e n le seguenti relazioni che descrivono il percorso di proiezione nel sistema di coordinate fisse del paziente:
₹ = (rT · ng) = xcos(y) + ysin(y) n = (rT. ny) =- xsin(y) + ycos(y)
dove r = (x,y)™ è il vettore posizione che rappresenta il punto generico nel piano. Si può ora sostituire alla funzione f, rappresentante il coefficiente di assorbimento nel sistema fisso (x,y), la funzione u, che rappresenta il coefficiente di assorbimento nel sistema (§,n):
f(x, y) = u({(x,y), n(x,y)) =u((rT.n;), (rT.nn)) f(x,y) = μ (ξ,η) n y ρίξ,η). r(x,y) ξ 8 x u p,(§) 1 Figura 3: Coefficiente di attenuazione per un generico punto rappresentato nel sistema fisso da vettore r(x,y) e nel sistema rotante dal vettore p(5,n) 77Corso di Laurea Magistrale in Ingegneria Biomedica Elaborazione dii Segnali e Immagini Biomediche ParteIII
Dal punto di vista fisico ovviamente si tratta del coefficiente di attenuazione di un generico punto, rappresentato nel sistema fisso dal vettore r(x,y) e nel sistema rotante dal vettore p(5,n).
f(x,y) = μ (ξ, η) + f § = x cos(7) + y sin(7) (x,y) (ξ,η) Figura 4: corrispondenza funzionale del coefficiente di attenuazione di un generico punto, definito nel sistema fisso dalle coordinate (x,y) e nel sistema rotante dalle coordinate (5,n)
y n r(x,y) 5 8 x L A P,(5) Figura 5: proiezione lungo una linea L. La proiezione corrisponde ad un campionamento spaziale lungo una linea L nella sezione. I fotoni del fascio di raggi X attraversano tutti i punti dell'oggetto che si trovano sulla linea L. Il tipico decadimento esponenziale dei raggi-X è funzione dai coefficienti di attenuazione appartenenti alla linea L.
Si definisce ora la proiezione o trasformata di Radon di una funzione f(x,y), indicata con py(5), l'integrale di linea della funzione f(x,y), lungo una linea parallela all'asse delle n ad una distanza ¿ 78Corso di Laurea Magistrale in Ingegneria Biomedica Elaborazione dii Segnali e Immagini Biomediche ParteIII dall'origine. L'operazione di proiezione corrisponde ad una operazione di campionamento spaziale e si può scrivere, per una data funzione f(x,y, k), la seguente formula:
8 +00 Py() = R[f (x, y)] = +00 J f(x,y)dn = f(x(5,n), y(5,n))dn = - I 00 8 f (šcosy - nsiny, Įsiny + ncosy) dn = f(x,y)&(xcosy +ysiny -§ )dxdy= |f(ř)&(}T·ñ{}-{)dř= 8 R2 (2) 8 f(r)8(r-L)dr = f*ÔL R2
Dove a x e y si è sostituita la loro espressione in funzione di ¿ e n, come menzionato nella (1). Si ricorda che la funzione delta di Dirac assume un valore diverso da zero soltanto nel punto che rende nullo il suo argomento, questo giustifica il passaggio dall'integrale singolo a quello doppio. Le ultime tre espressioni tengono conto della forma vettoriale introdotta dove r è il vettore posizione di un generico punto del piano e L è un vettore che rappresenta la linea lungo cui avviene la proiezione. L'argomento della funzione 8(r-L), rappresenta solo i punti del piano appartenenti alla linea L. Poichè l'interpretazione fisica di L è il percorso dei raggi X, L può essere sostituito da (r™ ·ng) = 5, perché § è la posizione del detettore per contare i fotoni rimanenti. L'ultima espressione in particolare corrisponde al concetto di campionamento spaziale.
Poiché la funzione py(¿) è la proiezione monodimensionale (1-D) della f(x,y) secondo l'angolo y, l'operatore trasformata di Radon calcola l'integrale di linea dell'immagine bidimensionale (2-D) lungo la direzione n. In definitiva, py(¿) è detta trasformata bidimensionale di Radon della funzione oggetto f(x,y).
In figura 6 sono mostrate le proiezioni a due angoli diversi y1 e y2, di un oggetto f(x,y); la funzione Py(¿) assume valori maggiori in corrispondenza di quei percorsi d'integrazione che attraversano "strisce" più lunghe dell'oggetto vedi figura 6.
1 In realtà si tratta di una funzione generalizzata, definita dalla relazione ___ 8(x)g(x)dx = g(0) con g(x) funzione continua in un intorno dello zero. 79Corso di Laurea Magistrale in Ingegneria Biomedica Elaborazione dii Segnali e Immagini Biomediche ParteIII
b(7) W y y x x a b Figura 6: Due proiezioni secondo diversi angoli y di un oggetto f(x,y).
La trasformata di Radon gode delle seguenti proprietà:
- è lineare: R[af + bg] = an[f] + bR[g]
- è simmetrica: le proiezioni sono funzioni periodiche rispetto a , con periodo pari a T e quindi simmetriche, pr()= Pr-m(-)
Perché la definizione data sia valida, non risulta necessario richiedere che la funzione f(x,y) sia continua e a supporto finito, ma basta richiedere che la funzione sia integrabile su ogni linea, cioè deve valere che:
If (šcosy - nsiny, ¿siny + ncosy)dn| < o per tutti gli(n, y) E RxS1 I 00 8
Si può dire che una funzione che soddisfa la precedente equazione è nel "dominio naturale" della trasformata di Radon. Questo requisito equivale a soddisfare le due condizioni seguenti:
- La funzione è sufficientemente regolare da essere integrabile su una linea
- La funzione tende rapidamente a zero, in modo che l'integrale precedente converga.
Le immagini mediche, poiché possono essere considerate funzioni continue a tratti e nulle al di fuori di un cerchio, appartengono al "dominio naturale" della trasformata di Radon.
Come si può facilmente intuire, nella pratica, la trasformata di Radon è nota (misurata) solo su un numero finito di direzioni (angolazioni) e per ogni direzione, su un numero discreto di punti. L'insieme dei dati raccolti dai rivelatori in ogni direzione è detto (nel caso discreto) sinogramma. Nonostante, quindi, in pratica si abbia a che fare con funzioni discrete, nel seguito per semplicità si tratterà il caso di funzioni continue.
80Corso di Laurea Magistrale in Ingegneria Biomedica Elaborazione dii Segnali e Immagini Biomediche ParteIII
Sinogramma
Le proiezioni ottenute con uno schema a raggi paralleli di un singolo punto fisso P, rappresentato da un cerchio rosso nella figura, sono organizzate nello spazio discreto di Radon (immagine con un numero finito di pixel) in una griglia Cartesiana (§,y) come riportato in figura 7b; tale rappresentazione viene detta sinogramma.
O O o 180° a b 1 c d Figura 7: a) Le proiezioni di un singolo punto fisso, rappresentato da un cerchio rosso, sono organizzati nello spazio discreto di Radon come in figura b; i pallini colorati rappresentano i pixel su cui si proietta il punto fisso nello spazio di Radon. d) Un'altra rappresentazione possibile dello spazio di Radon usando coordinate polari. Le proiezioni appaiono come un cerchio passante per l'origine. c) teorema di Talete con cui si ottiene la rappresentazione in d.
In una rappresentazione cartesiana della trasformata di Radon le proiezioni di un oggetto che giace fuori del centro di rotazione della tomografia produce una traccia sinusoidale. Per tale motivo questa rappresentazione grafica della proiezione è chiamata sinogramma.
81 oCorso di Laurea Magistrale in Ingegneria Biomedica Elaborazione dii Segnali e Immagini Biomediche ParteIII
un Y = 45° 50 100 Py (5) 150 200 50 250 300 b 350 y 150 200 a 250 50 100 150 200 250 Y x C Figura 8: a) immagine sintetica di 256x256 pixel composta di due oggetti rettangolari uno posto al centro di rotazione della tomografia e l'altro fuori centro. b) rappresentazione cartesiana dello spazio di Radon per l'immagine in a. c) rappresentazione in coordinate polari dello spazio di Radon per l'immagine in a.
Nella figura 8 è possibile vedere la proiezione di una immagine sintetica di 256x256 pixel (8a). L'immagine sintetica presenta due oggetti omogenei, un rettangolo posto nel centro di rotazione della tomografia e un quadrato fuori centro. Il coefficiente di attenuazione dei due oggetti, considerati omogenei, è posto uguale ad 1 e il coefficiente di attenuazione all'esterno di essi è considerato nullo. Le proiezioni sono acquisite tra 0 e 180º, poiché la proiezione lungo la stessa direzione ma nel verso opposto non aggiunge alcuna informazione (simmetria della trasformata di Radon). In figura 8b è riportata la rappresentazione cartesiana dello spazio di Radon (§,y) e in figura 8c la sua rappresentazione in coordinate polari. La proiezione risultante da un attraversamento delle zone a più alto valore di attenuazione è rappresentata con valori più chiari (una minore quantità di energia ha raggiunto la pellicola radiografica e di conseguenza si è ottenuto un basso annerimento), mentre con valori più scuri è rappresentata la proiezione risultante da un attraversamento delle zone con minore attenuazione (maggiore energia raggiunge la pellicola e quindi si ha un maggior annerimento). È facile riconoscere la traccia sinusoidale lasciata dall'oggetto quadrato. Più l'oggetto è lontano dal centro di rotazione, più ampia risulta la traccia sinusoidale nello spazio di Radon. Il rettangolo non genera una traccia globale sinusoidale, ma è possibile distinguere guardando la traccia generata l'andamento sinusoidale della modulazione dell'intensità luminosa della traccia. Quando l'angolo di 82 100 150 5 100 50
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
