Actuaciones del avión: principios de mecánica de vuelo y fuerzas aerodinámicas
Diapositivas sobre Actuaciones Del Avión. El Pdf explora los principios fundamentales de las actuaciones de los aviones, incluyendo la mecánica del vuelo, las fuerzas aerodinámicas y las ecuaciones de movimiento. Este material de Física, apto para Universidad, incluye fórmulas y diagramas explicativos.
Ver más10 páginas

Visualiza gratis el PDF completo
Regístrate para acceder al documento completo y transformarlo con la IA.
Vista previa
Actuaciones del Avión
Mecánica del Vuelo (de aviones): Ciencia aplicada que se ocupa del estudio del movimiento del avión en su desplazamiento por el aire.
Áreas de la Mecánica del Vuelo
Grandes movimientos del avión:
- centro de masas (cdg) según la trayectoria
ACTUACIONES
cdg Trayectoria o
Clasificación de Actuaciones
- Actuaciones puntuales: problemas locales de la trayectoria, donde el peso del avión puede suponerse constante (vuelos en crucero, en subida-descenso, en planeo, y en viraje).
- Actuaciones integrales: problemas globales de la trayectoria, donde la variación del peso del avión es esencial (alcance y autonomía).
- Actuaciones en pista: en los despegues y aterrizajes, las acciones de contacto suelo-ruedas son importantes.
Modelo Físico-Matemático para el Estudio de Actuaciones
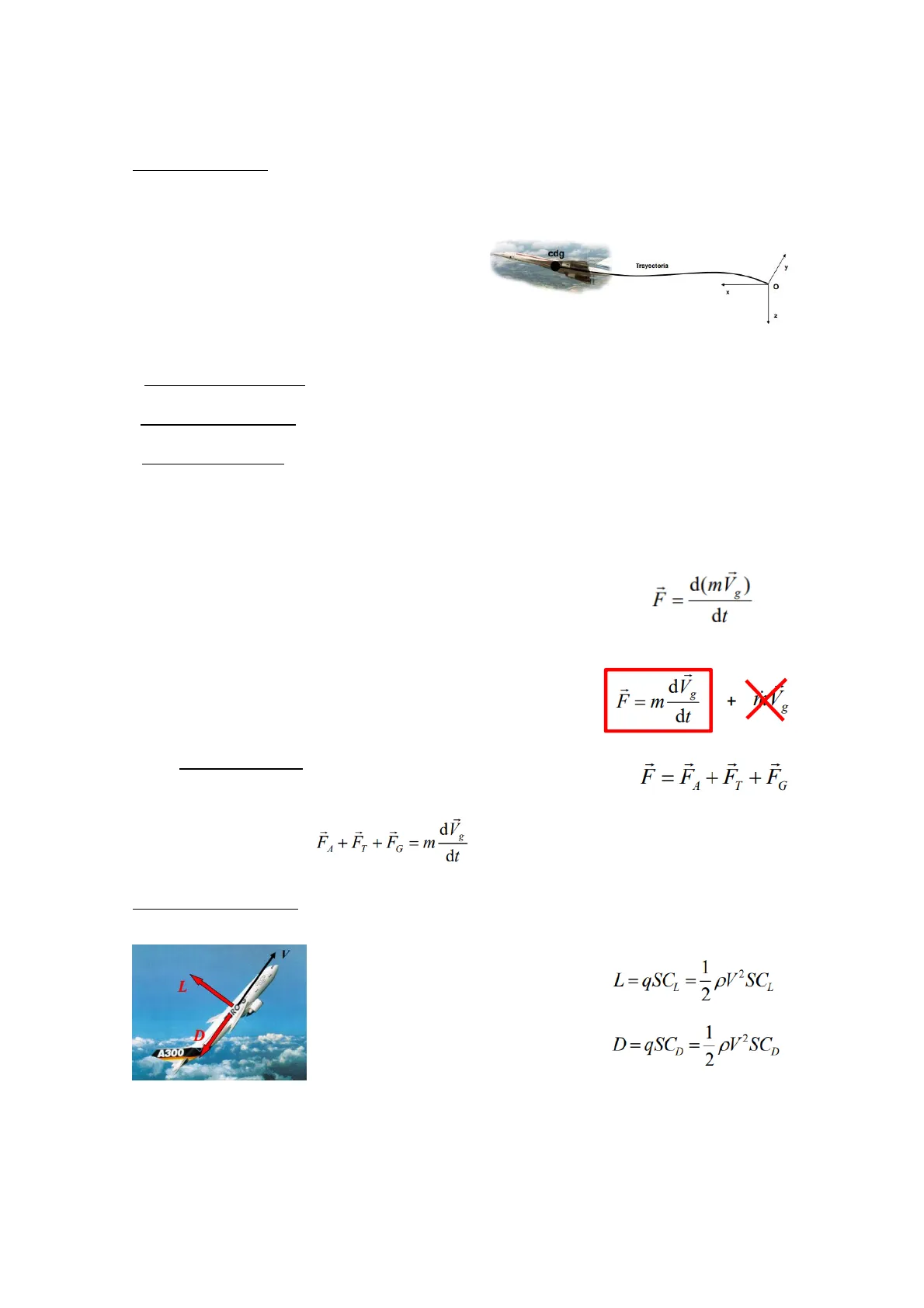
Para un sólido rígido el Teorema de la Cantidad de Movimiento establece que: F = Resultante de las fuerzas exteriores Vg = Velocidad absoluta del centro de masas del avión (en ejes inerciales) m = Masa del avión F = d(mÏ2) dt t = Tiempo Para un avión convencional se cumple que la variación de su masa respecto del tiempo es lo suficientemente lenta como para que pueda despreciarse el término con respecto a los otros términos que intervienen en el teorema. F = m g dt + g Como fuerzas exteriores se consideran las fuerzas aerodinámicas, el empuje del grupo propulsor y la fuerza gravitatoria o peso, todas ellas aplicadas en el centro de masas: F =F +F7 + FG Finalmente se obtiene: F + F1 + FG = M F=mªV& dt
Fuerzas Aerodinámicas
Las componentes de la fuerza aerodinámica de un avión son la sustentación, L, y la resistencia, D:
L BROU D A300 q = Presión dinámica del aire S = Superficie alar p= Densidad atmosférica V = Velocidad aerodinámica (velocidad del avión respecto del aire, Airspeed) L=qSC1 == pV2SCL CL, CD = Coeficientes de sustentación y de resistencia D=qSCp == pV2SCp
- rotaciones como sólido rígido alrededor delcdg >
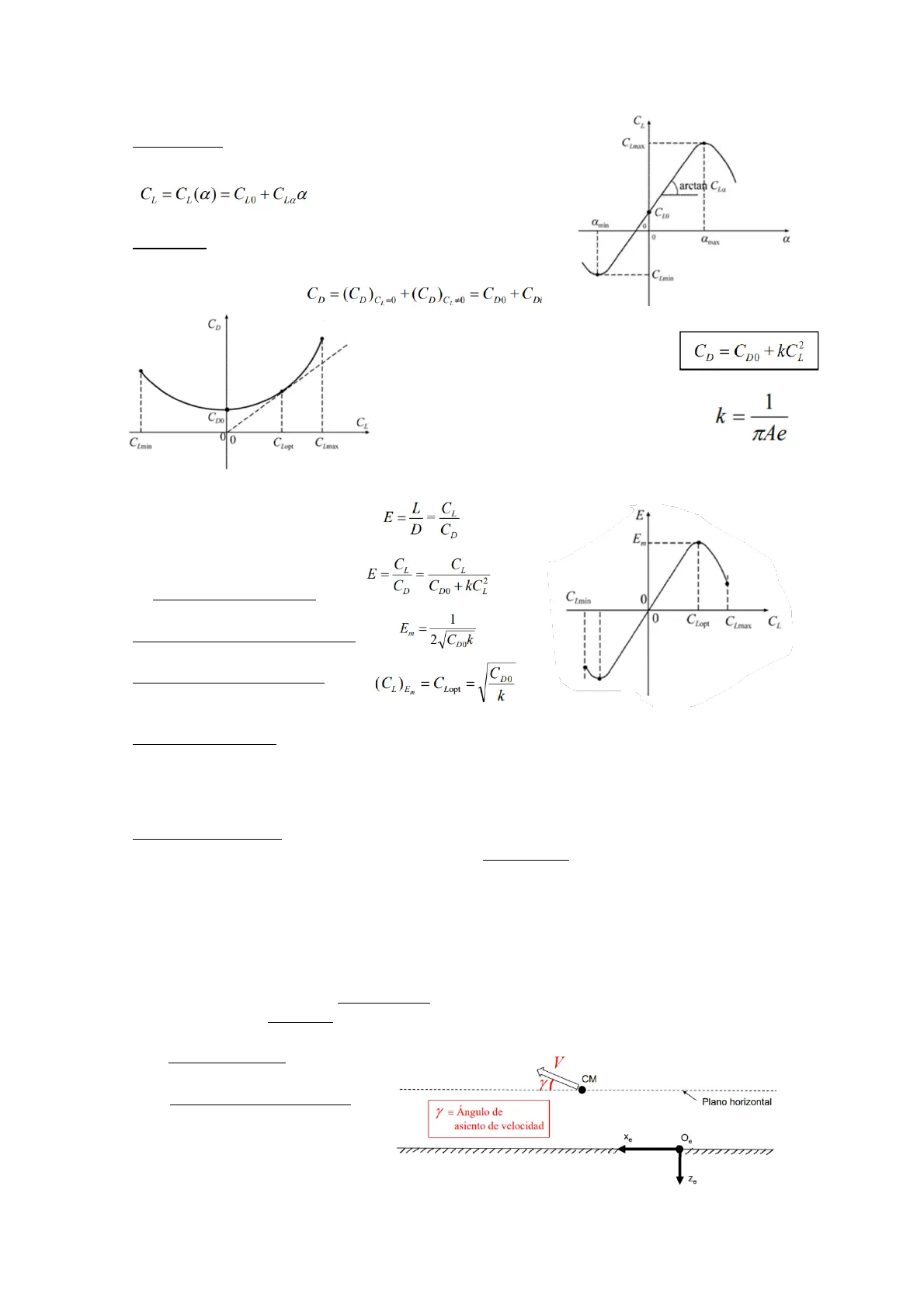
ESTABILIDAD Y CONTROLPuede suponerse que el coeficiente de sustentación, CL, es una función lineal del ángulo de ataque del avión, a : donde CLOy CLa son coeficientes aerodinámicos conocidos. CL = CL(a) = CLO + CLaa Puede suponerse que el coeficiente de resistencia, CD, es parabólico respecto del coeficiente de sustentación, CL (hipótesis de polar parabólica): CD =(CD)C1=0 +(CD)C1=0 = CDO +CDi Cp C DO CL CImin 00 CLopt CLmax CDo = Coeficiente de resistencia parásita CDi = Coeficiente de resistencia inducida k = Parámetro de resistencia inducida unitaria A = Alargamiento del ala (donde b es la envergadura alar) e = Factor de Oswald CD = Cp0 + kCZ k = 1 TAe La eficiencia aerodinámica, E, se define mediante: E == LC1 D CD Si la polar es parabólica de coeficientes constantes: Eficiencia aerodinámica máxima: En = 2 Cook 1 Coeficiente de sustentación óptimo: (C)EM = CLopt =CDO k Et E CImin 0 0 CLopt CLmax CL
Fuerzas Propulsivas
El empuje de los motores, T, para una posición de palanca dada, vendrá dado por una relación del tipo: T = T (h,V) donde h representa la altitud (en ISA es equivalente a la densidad) y V es la velocidad aerodinámica.
Fuerzas Gravitatorias
El peso del avión, W, está siempre dirigido según la verticallocal y viene dado por: W = mg donde m representa la masa del avión y g la aceleración de la gravedad (constante para el rango de altitudes en el que vuelan los aviones).
Actuaciones Puntuales
Actuaciones en Vuelo Horizontal, Rectilíneo y Uniforme
- El vuelo está contenido en un plano vertical (el centro de masas del avión nunca puede salir de ese plano vertical) y es simétrico (la velocidad aerodinámica está siempre contenida en el plano de simetría del avión y su empuje también).
- Las alas están a nivel (el ángulo de balance del avión es nulo).
- La atmósfera está en calma (la velocidad aerodinámica coincide con la velocidad respecto del suelo).
V Y CM Plano horizontal Y = Ángulo de asiento de velocidad Xe Je 77 Ze CZmax arctan CLa CLO 0 α CImim ECL_ C1 CD CDO + KC- Un sistema de referencia ligado a tierra (sistema de ejes tierra, Oe, Xe, Ye, Ze) puede considerarse inercial. - El vuelo es horizontal (el ángulo de asiento de velocidad es nulo) > y = 0 - El vuelo es rectilíneo (aceleración normal nula) y "uniforme" o estacionario (aceleración tangencial nula): dVg/dt = 0 F_+Ē,+FG=0 T = D L=W + n=1 Factor de carga = n = W V T CM h = cte W Og 77 Ze
Resistencia en Función de la Velocidad de Vuelo
n2w2 D == pV2 SCDo+k 1/2pV2S n=1 - D == pV2SCDo+k W2 1/2pV2s n=1 + D == pV2SCDo+k 1/2pV2s Cpo, k, S = datos p (ó h),W = datos
Velocidad Base (Minimum Drag Speed)
(D) =VB =VMD = 2W 2W k VCLopiPS VPS VCDo
Resistencia Mínima (para n = 1)
(Dain ) .- 1 = En Em CLoptk CDO E = 2yCDok 1 VB= VMD V
Velocidades de Vuelo
T = D - T == pvªSCDo+k 2W2 pVªs - V2 2W V = VPSC1(a) L=W - n=1 2W CLO C = 2W PSV 2 a = PSV2CLa CLa V2 ≥Vs V VMD VI V Velocidad de pérdida, Vs, es la mínima velocidad a la que es posible cada vuelo por limitaciones aerodinámicas. 2W 2W > V V = VPSCI V = VPSCz(a) CL V - - Para cada nivel de empuje (T) hay dos posibles velocidades de vuelo (V1 y V2). - Para que exista la velocidad de segundo régimen, ha de ser superior a la velocidad de pérdida. - Para cada altitud, la velocidad máxima (Vmax) se alcanza con empuje máximo (Tmax). - Techo Teórico: máxima altitud para la que es posible el vuelo horizontal, rectilíneo y uniforme. 2° Régimen - 1er Régimen D T D Pp W/E. D D == pv2SCp == pv2S(CDo+kC2) == pv2SCpo+=pV2SkC] Resistencia parásita = Dp = = p V2 SC Do Resistencia inducida = DI = = p V2 SCDi = = PV2 SkCZ W2 -IN nW 1/2pV2S 1/2pV2s II W W T=D=DW=D == "
Actuaciones en Subida y Descenso
F++ +FG = 0 1 - El vuelo es en subida o descenso rectilíneos (aceleración normal nula): Y = cte # 0 - El vuelo es "uniforme" o estacionario (aceleración tangencialnula): dVg/dt = 0 T-D-W siny = 0 L-W cos y = 0 +n= cosy <1 Va = Velocidad ascensional = ROC (Rate Of Climb) |2| < 1 T-D=WY Y = W T-D L=W n=1 Si T está en estas zonas ... D SUBIDA T DESCENSO PLANEO V2 VMD VI V Potencia disponible = PA = TV Potencia requerida = PR = DV T>D->>>0 Y = T-D W > T=D>Y =0 T < D >> < 0 T-D = Exceso de empuje
Actuaciones en Planeo
F1+FG=0 -+ L-W cosy = 0 x = V cosy h =V2=V siny Va = V sin y = -- DV W <0 Ya = Ángulo de descenso Va= Velocidad descensional Ze L-W cos y = 0-> L=W -> V = D D_CD 1 Ya = W I CL E (a ) V2=VYa=VD=vCD- 2W CD CL VPS C3/2 Hipótesis adicional: |y| << 1 -> sin(y) =y ; cos(y) = 1 (CD)Tami = CLopt + (E)yamin = Em + (V)yamin =VB= 2W (C)Van = \3C Lopt + (E)vm = 3 Em + (V)van 314 8 Vdmin-2 2 VB 3/4 Em E A B I C D 1 0 CLopt 31/2CLopt CLmax 1 Ya = Ε(α) 2W VPSC1(a) Yd min E. 1 2 CDOK=21 CDo m Planeador: FT= 0 L Y - W x. O. Y =- Ya sin ya = >0 Va =- Va =V sin ya= ->0 DV W 2W W T -D TV - DV _PA -PR W V 80 PLANO CM HORIZONTAL W X Va =Vy = W TV - DV _PA - PR W N - siny => Va = h=V siny = V = X-D-W siny = 0 siny = D < 0 W HORIZONTAL
Actuaciones en Viraje
- El vuelo está contenido en un plano vertical (el centro de masas del avión nunca puede salir de ese plano vertical) y es simétrico (la velocidad aerodinámica está siempre contenida en el plano de simetría del avión y su empuje también).
- Las alas están a nivel (el ángulo de balance del avión es nulo).
- La atmósfera está en calma (la velocidad aerodinámica coincide con la velocidad respecto del suelo).
- Un sistema de referencia ligado a tierra (Oe, Xe, Ye, Ze) puede considerarse inercial.
- El vuelo es "uniforme" o estacionario (aceleración tangencial nula).
- El vuelo NO es rectilíneo (la aceleración centrípeta NO es nula).
Looping (o Rizo) Ideal
Circunferencia (R constante) en un plano vertical, volando a velocidad V constante. T = D+W sin y L-W cos y = W V2 g R + n = cos y + V2 gR L T Y D W n -- 3 2 V2 =3 gR 1 0 0 45 90 135 180 225 270 315 360 Y(º)
Viraje Simétrico y Estacionario en un Plano Horizontal
Para cambiar la dirección del vuelo (virar) es preciso generar una fuerza "centrípeta" (hacia el centro de curvatura), perpendicular a la trayectoria. Algunos métodos para virar: Con un timón (como los barcos) o con un motor lateral. La componente de la sustentación en el plano horizontal compensa la fuerza centrífuga. Angulo de balance, ¢ L sin ¢ D PLANO HORIZONTAL m PLANO ( HORIZONTAL X h = cte O ye PLANO- SIMETRIA / E Ze - El vuelo está contenido en un plano horizontal (el centro de masas del avión nunca puede salir de ese plano horizontal) y es simétrico (la velocidad aerodinámica está siempre contenida en el plano de simetría del avión y su empuje también). - Las alas NO están a nivel (el ángulo de balance del avión NO es nulo). - La atmósfera está en calma (la velocidad aerodinámica coincide con la velocidad respecto del suelo). - Un sistema de referencia ligado a tierra (sistema de ejes tierra, Oe, Xe, Ye, Ze) puede considerarse inercial. - El viraje es estacionario o "uniforme" (aceleración tangencial nula). Xe Oe Ze V2 =3 n = cos y + V2 gR gR CL = 2W pV2S 5 cos y + 2W pSgR R = V2 g n-cosy 1D Oc m R PLANO (HORIZONTAL Xo h = cte ye PLANO SIMETRIA / Ze R = Radio de curvatura; @= Velocidad angular de viraje n= L W cos O 1 >n>1 C = = 1 2 W qs 2W Un T == PV2 SCDO+kn 2W2 DV2S El factor de carga, n, el coeficiente de sustentación, CL, la velocidad de pérdida, Vs, y el empuje, T, son mayores en viraje horizontal que en vuelo horizontal rectilíneo, para las mismas condiciones de vuelo y la misma configuración. D PLANO HORIZONTAL
Actuaciones Integrales
La trayectoria se contempla globalmente, desde un punto inicial hasta uno final. Perfil de la misión: vuelo horizontal rectilíneo y uniforme.
- Autonomía (Endurance): tiempo que es capaz de estar un avión en el aire, para una carga de combustible dada.
- Alcance (Range): distancia que es capaz de recorrer un avión, para una carga de combustible dada.
L f V T D Wi CM : W2 ) Wi-WFt W xe, t Consumo específico (de motores a reacción) (Specific Fuel Consumption, SFC), c): Ws = Peso fijo (estructura, pilotos, pasajeros ... ) WF = Peso variable (combustible) W(t)=W}+WF(t) dW dWELO dt dt dWF/dt T dmF/dt [c]]=s-1 [cT]= m-'s dxe dxe dt CJ = CTg CT = T V dx. dW CIT dW dt dW dt 1 dW -=- c,T dt dW cJT - T == pV2 SCDo +k 1 n22W2 pV2s Lsin ø = mV@ = m V2 R Lcos d = W n =__ >1 1 coSO Ø = 90° n-00 ø = 60° n=2 PSV2 V = 2W VPS CLmax coso 1 Vps CLmax $ = 45° n = 1,41 Ø = 0 n=1 - dre =V dt Cambio Variable Independiente: t -> W T = D PLANO AbarZONTAL
¿Non has encontrado lo que buscabas?
Explora otros temas en la Algor library o crea directamente tus materiales con la IA.
