Incertezze, lavoro ed energia in fisica con esempi risolti
Documento da Notewise su incertezze. Il Pdf, di livello universitario e materia Fisica, esplora il calcolo delle incertezze in diverse operazioni e i concetti di lavoro ed energia, con esempi e interpretazioni grafiche.
Mostra di più29 pagine

Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
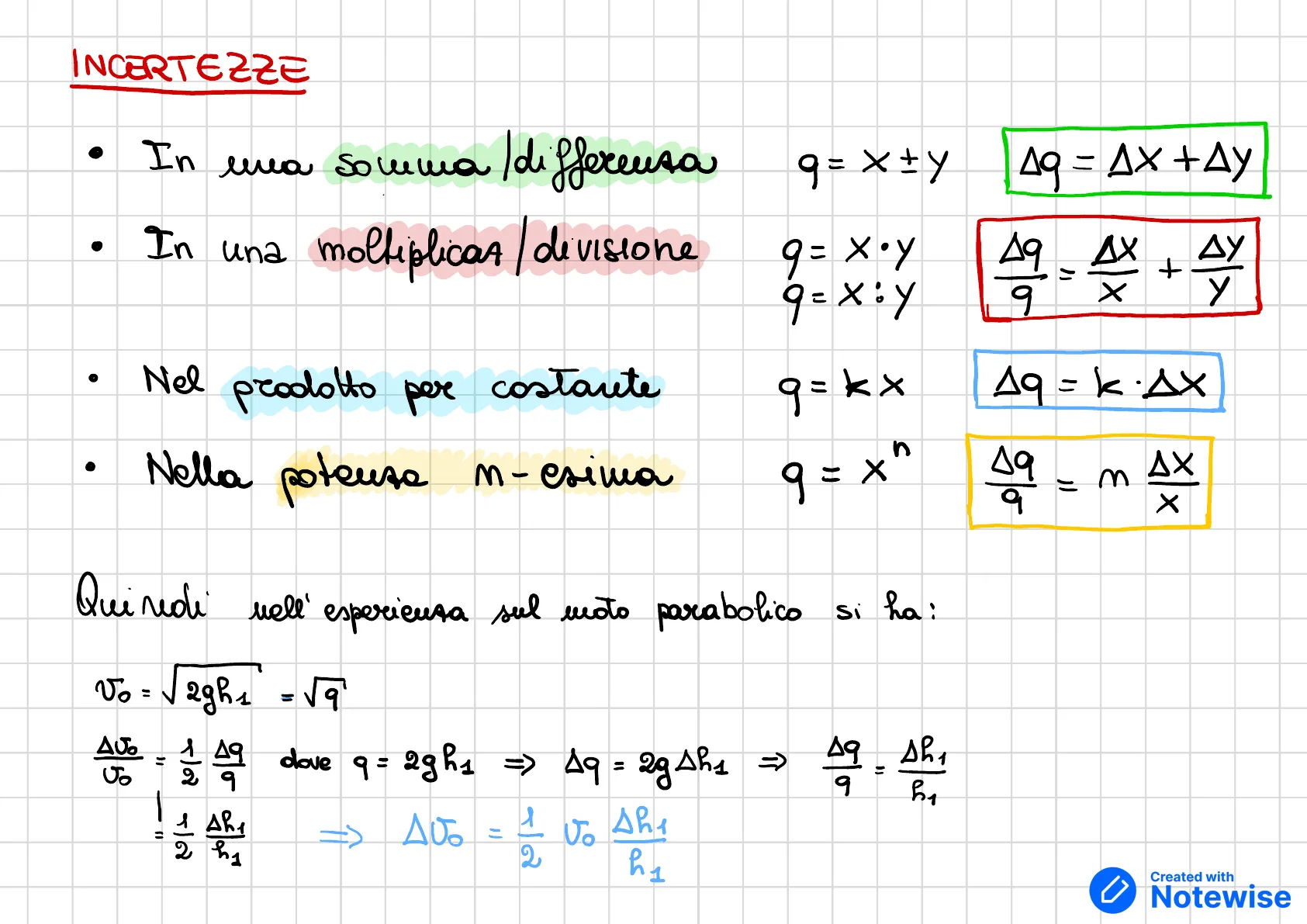
Incertezze nelle misurazioni
Incertezze in somma/differenza
INCERTEZZE · In una somma /differenza q=x+y 19= 1x+Ay
Incertezze in moltiplicazione/divisione
· In una moltiplicaA divisione 9= X.y q=x:y 액 : 災 +
Incertezze nel prodotto per costante
. Nel prodotto per costante q= KX 19= KAX
Incertezze nella potenza n-esima
. Nella potenza nº csima = x' n o9=mO
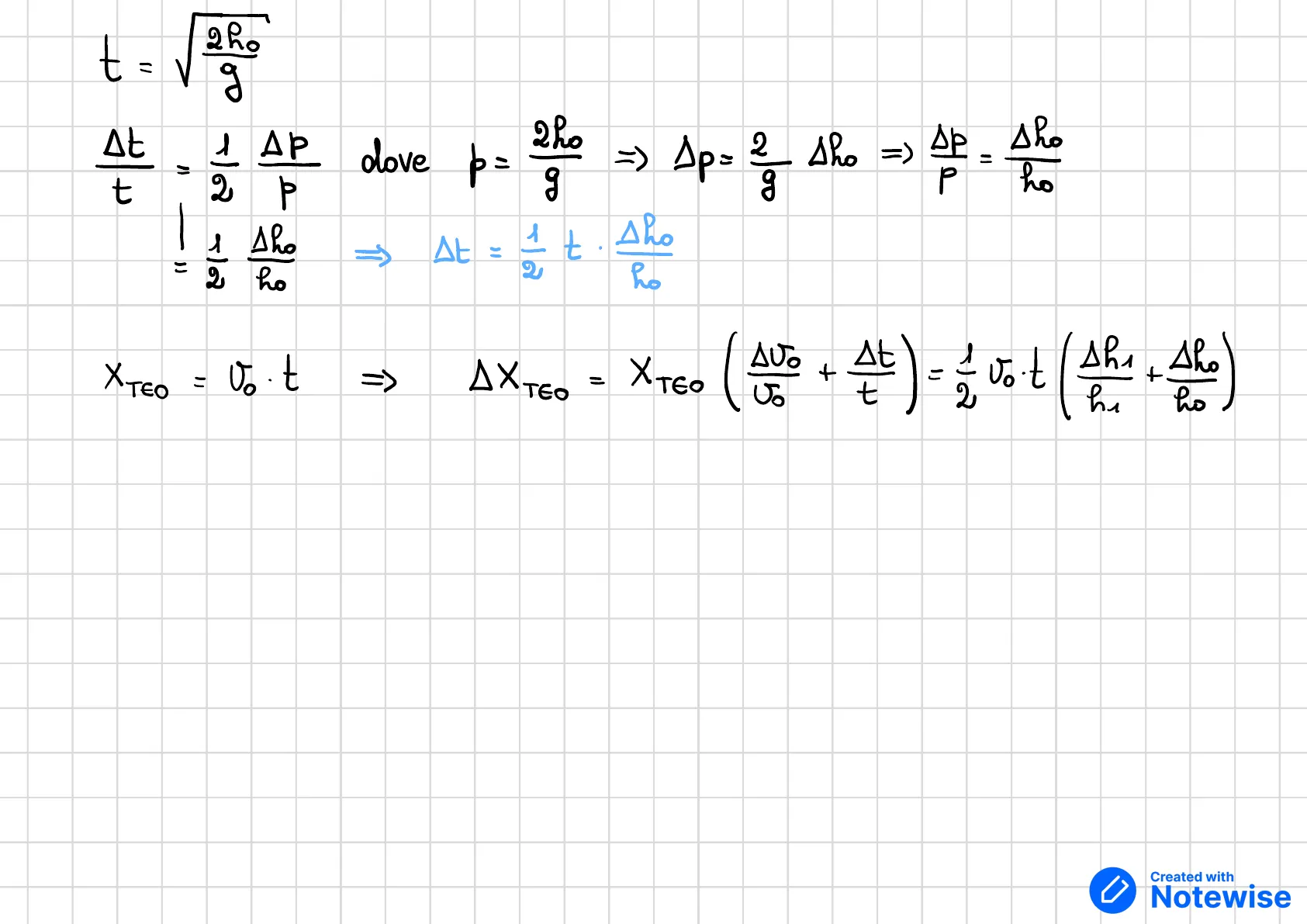
Esperienza sul moto parabolico
Quindi nell'esperienza sul moto parabolico si ha: Vo = 2gh1 = Vq 식 품 : 슬 쩍 dove q = 2gh1 => Aq = 2g Ah1 => A9 - Ah, Ah1 1 2 h1 Ah1 AVO = 1 Vo 2 Ah1 h1 Created with Notewise2ho t = V g 1 2 P AP dove p= 2ho 9 P ho => Sp= 2 Sho => AP Aho g At 7 S 1 1 2 Aho ho => At = 1 t. Aho = XTEO = Vo.t => TEO AX IE0 = XTE Ao + At) - Vot (ARA , Sho) ( Created with Notewise hom 131 pag 130 h = 2,0 m X = 4,6 Ml hc = 3,05m 2 = 45° Vo = ? 'C 5 x = vort y=h +Voyt- 2gt2 Voy = Vox 4,6 = Voxt 3,05 = 2+Voxt - 4,91t2 1 1 X t= 4,6 Vox ) 5 1,05 Vox - 4,6 Vox =- 104 104 K OX = 7 1 7 2 15 3,55 S Voy Vo = V2 Vox = 7,7 eu S Created with Notewise 4,6 2 1,05 = 06x. 4,6 - 4,91 Vox = 5,6 50,7m 1 1 1 / 1 1 - 2,2 l 1 - VF = Vfx + 2+2 Vfx = Vox Ufy= Voy -gt
Moto circolare uniforme
Definizione di moto circolare uniforme
MOTO CIR CO LARE UNIFORME Un corpo si muove di moto circolare quando la traiettoria seguita dal corpo è una circonferenza. Inoltre, se il moto è circolare uniforme, la velocità deve essero costante un modulo. B UB 7 A A
Periodo e frequenza
T = período f = Oto Frequenza Created with Notewise A fy 1,4m C 150Il PERIODO è il tempo impiegato dal corpo un giro di cuiconferenza [s] T == 1 f per perco T La FREQUENZA rappresenta il n° di giri che il corpo riesce a perco ere mu 1 secondo E HZ=1]
Velocità tangenziale
La velocità di un moto circolare si può calcolare usando la definizione di velocità nci MIRU 2 Tr 2 r v = VELOCITÀ' T TANGENZIALE v = 2Mr f m 41 r2 = 3,0 cm V = 0,67 f1 = 45 giri 45 60 HZ / min Created with Notewise v = DX At = = - 0,75 HZy 5 . X = Voxt Y = Vout- 1 2 t == Vox 9t2 9 ~ X - lox 9 x2 = xLgx-y X Vox = Vo cos X Voy = Vo sen & y = tqd x - 2 5° con Ex 9 x2 7 1,55 < r < 1,80 V -50 (xtgx-y) 2 cos2x { 2 134 20 2 < 1,85 1,85 134 3,6-1,75 134 -1,85 < - < - 1,65 2502 1345 (3,4-1,75) vo2 1,65 < L 1,85 00 > 8,51 S V. č 9,01 5 Created with Notewise 134 202 < 1,75 134 1,55€ 3,4 - < 1,75 252 134 V=2 51,65 VOL. 13,6 1,65 134 202 1,75 1,50 € y s 3,4 - 2 134 X y = Voy Vox 9 25° cosx +22 Tr R v= VA > VB A A B' B B 8
Velocità angolare
2TY VELOCITÀ 3 = At T Wf = Wo + at 2 Tr = 2 Trf = wr Q(E) = O0+Wot+{xt 2 W= = 1 Il RADIANTE è l'ampiezza di un angolo circonferenza lunga quanto il raggio che sottende un arco di l 8 (cod) = Created with Notewise ANGOLARE 0 v = T 25 T 1 TUB
Accelerazione centripeta
Quindi esiste un'accelerazione 70 a 100 à° _ DO _OB - VA VB A At At 150 A L'accelerazione è un vettore diretto come il raggio e con Verso che punta il centro della cui conferenza => ACCELERAZIONE CENTRIPETA Qc = w2r = = Created with Notewise QC 0 An. 57 X = 0,0188 rod S2 v= 110 S r = 660 me = 1,1 € 4,5 S a = ? Teoria pag 91 02 137 pag 130 2 hr V= = 250 km/s T = r = 30.000 anni-luce 21 . 3×10 x 9, 66 x 10 - tecu 4 12 1 a .- l = 9,46x102 km 250 kou/s 15 = 7, 1 x 10° s - 7,1 x 1015 . = 3,2 × 107 1 anno = 365 x 24 x 3600 S - 2,2 x 10° ami 8 Created with Notewise ac = = 1 = 18,9 52 a = Va2 + ac2 122+ 18,92 52 = 22,4 310 S M 50 pag 120 A 2115 v= L = 60° At = 0,750 S 3 B 0 l= 80 cm v = ? T = 360. At = 4,50 s 2 Qc = ? 25. 0,80m a= v2 = (1) 82 1,5 M 0,30 DX = S2 a = xr t - = 12,0 l 52 = V 1 1 = 3,2 x 10* S T = ?
Moto armonico
Definizione di moto armonico
MOTO ARMONICO E A A A1 A+ A) A2- A 2 3 B 1 t D 1 m V(E) C C + C v = d. f [ 4] € B1 AI DI Si ha moto armonico quando l'accelerazione del corpo è direttamente proporzionale allo spostamento a (t) oc s (t) Created with Notewise * (t) B r 0=B alt) 1 2ALO = r caso = + cos (cat) x (E) = r cos (ct) r = Ampiezza W = Pulsazione v (E) = - wr sin (wt) UMAX) = Wr ~ 1 QMAX1=Wr 1 89 W= 15,7 rod r=2,0 mm x (t)=(2,0 mm) sin 15,7 cod.t) x (0,55) = (2,0 mm) sin (15,7 cad. 0,58) I
Moto armonico di una molla
MOTO ARMONICO Di UNA HOLLA FJ Q > × TO Consideriamo un corpo attaccato ad una molla posta su un piano privo di attrito e allunghiamo la molla Le leggi della dinamica applicate al sistema P = FN Fre = mã - - kx = mà à - - k x - Fee = - ma デ ニ ー に メ MOTO k x = - ma ARMONICO X O a = - m 1 K m = w2 w= k m 21 Vm T = 27 ML K V PERIODO Di OSCILLAZIONE DEL MOTO ARMONICO v Created with Notewise a (t) = - wer cos (wt) = - w2x(t) X F = - kx a =- w2xM 104 r = 0,1230 m x (E) = 0,0410 m a (E) = - 2.81 1/2 x (E)= r cos(ct) a(E) =- w2 r cos(cut) = - w2x (t) M 135 pag 130 1 v (m/s) 1 -- - 1 1 I i 1 - 1 1 1 2 13 4 1 5 6 t (s) 1 1 1 -4 + a (t) = - w2 x (t) w2 _ _ a(t) _ _- 2,81 68,5 = x (t) 0,04,10 ya rool S2 - Q MAX = W2+ VMAX = WY w= - 1,8 Is2 = 0,30 HZ VMAX 6,0 Is QMAX 1,8 r= W2 3/20 (0,3)2 52 52 x (t) = r.cos (ct) cos (wt) = x (t) wt= cos-1(*(+)= così% 0,0410 UX 0,1230 Kr = 70,5° = 1,23 rod 1.23 rad t= 11 0,149 s 8,28 Bod 5 211 2TY T= 20 = = 0,759 1 8,23 rod S Created with Notewise -1,8 1 20 t (s) 1 a ( t ) 1 1 1,8 QuAx = 1,8 4 82 VMAX = 6,0 S aMAX = W-VMAX QMAX 3 68,5 cod =8,28 regal = 20 m x (t)
Moto armonico del pendolo semplice
MOTO ARMONICO GENERATO DALL' OSCILLAZIONE Di UN PENDOLO SEMPLICE -- - CA Piccoli ANGOLI ossia angoli < 5,7º 2 Y TK Tensione delle June B PX 1 « P 0 2 = = posizione di equilibrio Fx = ma Per piccoli angoli sind à 2 - Kg sind = ma OA = dr = + sind = BA - Sin 2 = BA = r 1 a = - g= = confrontando con a =- wx w2 = 00/5 2} g T= 2₸ = w= V T r r g Il periodo del pendolo non dipende dall'ampiezza dell'oscillazione. ISOCRONISMO DELLE OSCILLAZIONI
Principi della dinamica
Primo principio della dinamica
1° PRINCIPIO DELLA DINAMICA Se la risultante di tutte le forse è nulla allora il corpo mantiene lo stato di moto che aveva inizialmente.
Secondo principio della dinamica
2° PRINCIPIO DELLA DINAMICA Se la risultante delle forze non è nulla allora il corpo acquista un'accelerazione direttamente proporzionale alla risultante delle forze F = mã
Sistemi di riferimento inerziali e non inerziali
Sistemi di riferimento si dicono INERZIALI Se vi essi valgono i principi della dinamica => sistemi vierziali sono quei sistemi che si muovono di moto rettilineo uniforme o sono fermi. Nei sistemi non inerziali non valgono i principi della dinamica e quindi è necessario introdurre delle forze per spiegare Create lovitomeri Notewise a =- @ x 00/1 A
Forze apparenti
-Forze apparenti Nei sistemi non nierziali i corpi subiscono delle accelerazioni anche ni assenza di forze applicate Tale accelerazione è uguale ii modulo, ma opposta ni verso al'accelerazione che ha il (non inerziale) Sistema di riferimento rispetto ai sistemi vierziali Per estendere la validità dei principi della dinamica anche a sistemi non inerziali bisogna introdurre delle forze fittizia, chiamate FORZE APPARENTI Esempi Autobus o auto che accelerano o frenano Auto che percorre una curva, ecc .. Esamimanio il caso dell'ascensore che sale o scende con moto accelerato. · Ascensore che sale con moto accelerato sentiamo più pesanti ci · Ascensore che decelera per fermarsi Sentiamo invece più leggeri. ci Il peso apparente è maggiore del peso reale € TZ N = Fapp + P/ => ci sentiamo più pesanti xchè TO Per un osservatore esterno, solidale con un sistema di riferimento nersale la scatola ha l'accelerazione dell'ascensore => [ Fi #0 Per un osservatore all'interno dell'ascensore la scatola è ferma => ci dev'essere una forza apparente che deve bilanciare Ne ° - > N I tappi Viceversa, se l'ascensore sta frenando, allora la forza apparente è diretta verso l'alto e la relazione diventa: N = P- Fapp => ci sentiamo più leggeri Se il cavo dell'ascensore si spezza Fapp =- ug quindi N=O e ni apparenza sembra che il nostro peso sua OCreated with In realtà è un moto di coduTa accelerato con ONoteUna situazione analoga Succede nei sistemi rotanti. I sistemi che si muovono di moto rotatorio hanno un' accelerazione # 0 (accelerazione centripata) e quindi non sono inerziali. Quando siamo su un'auto che affronta una curva o su una grasTra in moto abbiano la sensazione di sentire su di noi una forza che ci spinge verso l'esterno. In realtà, per un osservatore inerziali, su di noi non agisce alcuna forza -> la tendenza è quella di mantenere il nido che avevamo inizialmente (ni questo coso proseguire per la tangente) Fcf = - FC cf FC Fcf = mc2r w 74 pag 73 P = 800 N N = P+ F N= 900 N Fapp = N-P N2 = 750 N = 900N - 800 N = 100N Fapp Fapp . 9 app P 100N . 9,81 M P= mg => um ={ = kg = 1,23 4 800 x S2 b) N=P-F. app app = a= = (P-N) g (800-750) ~ . 9,81 M 82 = 0,613 52 P 800 N Quindi si introduce una forza apparente Far (FORZA CENTRIFUGA) che ha lo stesso modulo della forza centripeta, ma verso opposto. Created with Notewise 5 90 app Fapp = me lase Case = P-N rl1 73 pag 123 u 74 pag 123 r = 3,8 m v = 2,0 M/s 0 2 un = 400 kg F = Fc = mac = u v2 V= 55 ku ker = 15 m = 1000 kg M = 0,7 r = ? u 75 Mac = P+ N P+N = mg +N Qc = g +M = 9,81 M + 235 N 68 kg m = 68,0 kg r = 1,20 m 1 = 13,3 eu 82 N = 235N v= ? V= Ve.Qc V1,20 m x 13,3 l = 3,99 eur 82
Trasformazioni di Galileo
Osservazione dei fenomeni e sistemi di riferimento
L'osservazione di un fenomeno è legata al sistema di riferimento scelto. Le leggi della fisica rimangono le stesse se il sistema di riferimento si muove di moto uniforme Quindi la "forma" della legge rimane uguale, ma possono cambiare i valori delle grandezze coinvolte Consideriamo un sistema S' che si muove, rispetto col À con velocità V. Created with Notewise · Fc Fc = Fcf = Fa 1 02 cf 12 02 == = =. 2 mx ( 15) 2 une = 33 mu 0,7x 9,81 La.
Trasformazioni di Galileo: spazio e velocità
Trasformazioni di Galileo F = ?SI K P $ 1 S' simuove con velocità V e quindi nel tempo t ha percorso lo spazio VE vit Utilizzando la somma vettoriale 5" = " + Vt Nell'ipotesi che t =t' allora AS = ' + VE -> v° = = '+ V velocità del corpo rispetto od S velocità del corpo rispetto od S' S' P S 1 ib K 13 1. 61 pog 71 V = 0,60 u S S = 18 m t = 9,0s v = = = 18 u E 9.0 $ = 2,0 14 S v = v - V = 2,0 € - 0,6 u = 1.4 5 Ext N P T F SpT 12 Ute V [s = 5,0 x 103 m - 6,0 m/s · t] V= 36 km/p = 10 v = 3,6 km/h = 1,0 m/s Vp = 18km/h = 5,0 m/s VIC = V+V - 11 =(10 +1)5 319 5PT = VTE- Vp = 11 ul - 5 L 1 6,0 ml S = 11 Ml velocità del Turista rispetto peschereccio el Sp = Spo + Vprt 1 =(5×10m)-6,0tut la velocità del peschereccio rispetto al turista sarà - 6,0 Created with Notewise 66
Esempio: turista su una nave
ORA PROVA TU Un turista cammina alla velocità di 3,6 km/h, in direzione della prua, sul ponte di una nave da crociera che si muove alla velocità costante di 36 km/h. Nello stesso verso di marcia della nave, 5,0 km più avan- ti, vede un peschereccio che naviga alla velocità costante di 18 km/h. Scrivi la legge del moto del peschereccio nel sistema di riferimento del turista che cammina sul ponte del- la nave. PT + P = UTE 1 -> Velocità del sistema S rispetto ad S (fisso)
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
