Fisiologia: Lezione 1 sul sistema somatosensoriale
Documento dall'Università sulla Fisiologia: Lezione 1 27/02/2024. Il Pdf esplora il sistema somatosensoriale, la neuroanatomia del tatto e della sensibilità dolorifica, con illustrazioni e percorsi neuronali, utile per lo studio della Biologia a livello universitario.
Mostra di più8 pagine


Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
Il sistema somatosensoriale
Il sistema somatosensoriale si suddividere in tre sotto sistemi: l'esterocezione, la propriocezione e l'enterocezione.
L'esterocezione permette di percepire gli oggetti esterni intorno all'individuo (esempio toccare un cellulare, abbracciare una persona ecc), può essere a sua volta suddiviso:
- discriminativo (consente di capire se una superficie è liscia o ruvida, soffice, calda o fredda ecc);
- tatto interpersonale ed affettivo (componenti distinte del sistema nervoso rispetto al tatto discriminativo, sia dal punto di vista periferico che centrale);
- termocezione;
- nocicezione (percezione di stimoli dolorifici).
La propriocezione invece è la percezione della posizione e del movimento del corpo. L'enterocezione è un termine molto ampio a cui si fa riferimento alla percezione spesso inconscia degli stati del nostro corpo (es se i visceri sono distesi, il senso della fame che è presente se lo stomaco è vuoto, i segnali che il corpo invia relativi alla pressione sanguigna di cui non siamo consapevoli).
Neuroanatomia
Neuroanatomia del tatto e della sensibilità dolorifica
Tutti gli stimoli sia tattili che dolorifici originano dalla pelle. Neuroni sensoriali tattili e dolorifici sono neuroni pseudounipolari, ovvero neuroni con un corpo cellulare dislocato lateralmente, un assone periferico che va verso la pelle e un assone centrale che si dirige verso il midollo spinale nelle radici dorsali (sensisibilità somatica):
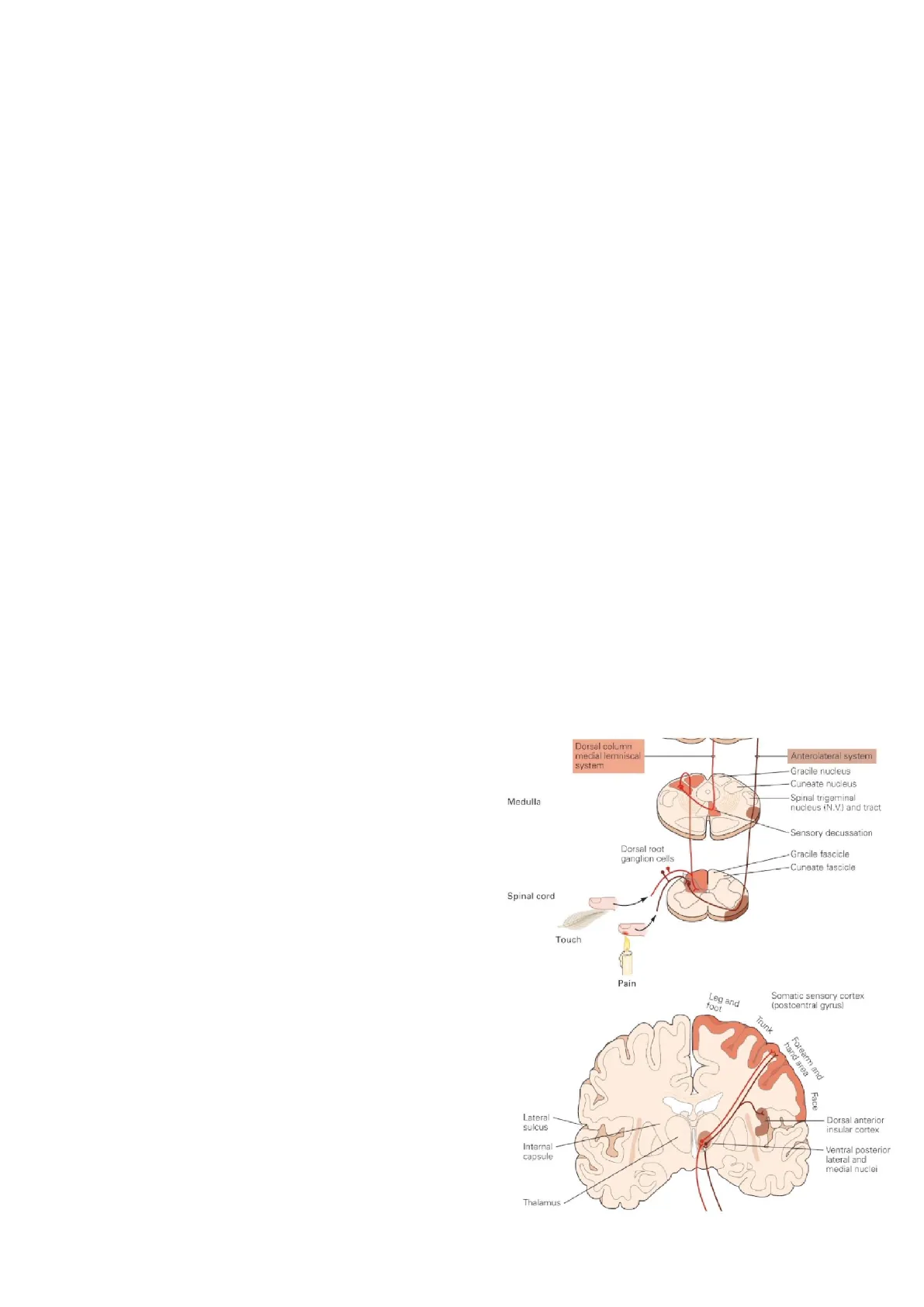
- Neuroni sensoriali o tattili (rosso): dalla pelle il neurone entra a livello delle corna dorsali del midollo spinale ascende attraverso la via delle colonne dorsali (via diretta - non decussa) fino ad arrivare al midollo allungato dove fa sinapsi nei nuclei Gracile e Cuneato. A questo livello parte il secondo neurone che decussa e va a formare il Lemnisco Mediale che ascende fino al Talamo (tutti i sistemi sensoriali prima di arrivare alla corteccia passano per il talamo che filtra il segnale prima di arrivare alla corteccia), dal talamo parte il terzo neurone della catena che giunge alla corteccia, in particolare nella corteccia Somatosensoriale Primaria (S1), presente nel lobo parietale.
- Neuroni sensibilità dolorifica (bordeaux): uno stimolo dolorifico attiva un neurone che entra nel midollo spinale dalle corna dorsali, fa sinapsi, decussa allo stesso livello e risale fino al talamo, dal Talamo (terzo neurone sensoriale) proietta in diverse parti della corteccia: la corteccia somatosensoriale Dorsal column medial lemniscal system Anterolateral system Gracile nucleus -Cuneate nucleus Medulla Spinal trigeminal nucleus (N.V.) and tract Sensory decussation Dorsal root ganglion cells Gracile fascicle -Cuneate fascicle Spinal cord Touch Pain Leg and foot Somatic sensory cortex (postcentral gyrus) Trunk hand area Forearm and Face Lateral sulcus Dorsal anterior insular cortex Internal capsule Ventral posterior lateral and medial nuclei Thalamoprimaria S1 che localizza lo stimolo nocicettivo ed alle strutture del sistema limbico (gestisce le emozioni ed è modulato sia dagli stimoli nocicettivi-dolorifici sia da quelli tattili-affettivi).
A livello del midollo (corna dorsali) i neuroni tattili e dolorifici interagiscono tra di loro, i due sistemi non sono indipendenti, questo permette di modulare gli stimoli dolorifici (es: dentista prima di fare l'anestesia può esercitare una pressione sulla gengiva che aiuterà a percepire meno il dolore causato dall'ago).
Neuroanatomia del Tatto
Da una stimolazione della pelle si attivano dei meccanocettori, corpuscoli specializzati, che trasformano un segnale di tipo meccanico, come la deformazione della pelle, in un segnale elettrochimico (trasduzione del segnale), da qui arriva al midollo spinale, poi ascende ai nuclei Gracile e Cuneato del midollo allungato, giunge fino al nucleo ventrale posteriore del talamo per poi arrivare alle cortecce somatosensoriali.
Deformazione della cute
Negli ultimi anni si è stati in grado di studiare in maniera A quantitativa, quindi di misurare, la deformazione della pelle nel momento in cui si entra in contatto con la superficie. Quando il Robotic platform polpastrello scivola sulla superficie, si deforma creando una compressione della pelle nel punto di contatto e una distensione della pelle subito dopo. Per la misurazione esistono macchinari Hand support appositi: un supporto che tiene bloccato il dito, una lastra di vetro B global İD C local che scivola sotto la pelle può avere varie texture e una telecamera che consente di riprendere queste immagini ad alta risoluzione. R U Una volta acquisita l'immagine (img.C) si può andare a studiare in maniera dettagliata la deformazione meccanica tramite un metodo che si chiama triangolazione: si prendono dei punti X specifici sull'immagine che formano dei triangoli, Z 1 +4N successivamente si studia come questi triangoli si deformano tra x un frame e l'altro nei diversi assi di movimento in modo da quantificare la deformazione della pelle.
Amplifie Microneurography electrodes e. e 8 VY Successivamente si mette in reazione la deformazione della pelle con la risposta delle fibre nervose (trasduzione del segnale), questo avviene tramite una serie di micro aghi che misurano la risposta di un neurone sensoriale (neurone recettivo relativo a quella porzione di pelle).
Stimolo sonda Elettrodo di registrazione Campo recettivo Nervo mediano Schematicamente: il neurone (blu) termina su una porzione della pelle e su questa porzione della pelle sono posizionati i meccanocettori che si occupano della trasduzione del segnale. Mediante un elettrodo di registrazione si registra la (a) risposta del neurone e la sua relazione con gli stimoli somministrati in periferia.
Meccanocettori e Neuroni Sensoriali
Sulla cute della mano possiamo distinguere 4 tipi di meccanocettori:· Corpuscoli di Meissner (meccanocettori di tipo1, superficiali) - discriminazione di dettagli fini · Dischi di Merkel (meccanocettori di tipo1, superficiali) - discriminazione di dettagli fini (es, testo braille) · Meccanocettori di Ruffini (meccanocettori di tipi 2, profondi, presenti nel derma) - risponde allo stiramento della pelle · Corpuscoli di Pacini (meccanocettori di tipi 2, profondi, presenti nel derma) - sensibile a vibrazioni ad alta frequenza, risposta ottimale intorno ai 200 Hz Ciascun meccanocettore è legato alla fibra nervosa del nervo periferico questi sono nervi mielinizzati, fibre beta di medio calibro a conduzione rapida.
I meccanocettori esprimono una particolare proteina canale che Cell si chiama PIEZO2: uno stimolo meccanico deforma la pelle, la deformazione si trasmette al meccanocettore che presenta sulla sua superficie dei canali ionici, la deformazione meccanica amplificata/filtrata dalle strutture fibrose del meccanocettore produce una forza che si trasmette sulla membrana cellulare del neurone che ne modifica la conformazione del canale determinando un'apertura e un'entrata di ioni sodio che produrranno una depolarizzazione del neurone con il potenziale d'azione.
Il campo recettivo è la porzione di pelle a cui risponde un determinato neurone, i recettori di Tipo1 (Meissner e Merkel) hanno un campo recettivo più piccolo, mentre i recettori di Tipo2 (Ruffini e Pacini) hanno un campo recettivo più ampio. I meccanocettori più superficiali hanno un campo recettivo limitato mentre quelli profondi maggiore.
I meccanocettori si dividono anche in base al loro adattamento, rapido o lento: i recettori a rapido adattamento sono i recettori di Meissner e Pacini e rispondono soltanto all'inizio e alla fine della stimolazione, i meccanocettori a lento adattamento (Merkel e Ruffini) rispondo in maniera continuativo anche nel contatto statico con l'oggetto.
1 Epidermis Meissner corpuscle (RA1) Dermis Merkel disk- receptor (SA1) Ruffini ending (SA2) Sweat gland Pacinian corpuscle (RA2) Peripheral nerve bundle Gene silencing Gene silencing Mechanical force Measure Mechanical force Measure Cell Candidate gene 1 - 71 Candidate gene 72 PIEZO1 PIEZ02 Touch Proprioception Closed Mechanical force Daen A Meissner corpuscle (RA1) Merkel cells (SA1) Pacinian corpuscie (RA2) Ruffini endings (SA2) Receptors Receptive field B Neural spike train Stimulus Nella prensione di un oggetto si ha una risposta immediata dei meccanocettori a rapido adattamento che poi rimangono silenti, mentre abbiamo una risposta continuativa nei recettori a lento adattamento.
Bare nerve endingNeuroni sensoriali e Radici Dorsali Ciascuna porzione del corpo è innervata da nervi ce fanno riferimento a una specifica radice dorsale, dermatomero, ciascun dermatomero è identificato dalla radice dorsale che lo innerva. Fa eccezione il volto che innervato dalle tre branche del Trigemino che non prendono contatto con il midollo spinale ma con i nuclei del trigemino presenti nel tronco encefalico.
Area innervated by- trigeminal norve Arca innervsted by trigemini narva TU 82 12 13
Recettori Muscoloscheletrici
I recettori del sistema muscoloscheletrico sono responsabili per la propriocezione, sono 3:
- Fuso Neuromuscolare: costituito da A Muscle spindle una serie di fibrocellule muscolari modificate che si trovano in parallelo rispetto alle fibre extrafusali, presenta Intrafusal muscle fibers una regione centrale non contrattile e Capsule una regione polare contrattile, è Sensory endings Extracellular lon channel avvolto da una capsula ed è innervato Afferent axons sia da un nervo afferente (trasmette il segnale dalla periferia al centro) sia dal nervo motorio (gamma motoneurone) che consente di regolarne la sensibilità. Cytoskeletal strands Un allungamento nel fuso neuromuscolare determina una deformazione della fibra nervosa che lo avvolge che andrà ad aprire i canali Piezo2 con afflusso di sodio e depolarizzazione del neurone. Il fuso neuromuscolare da informazioni riguardo la lunghezza del muscolo e la velocità di allungamento del muscolo. Intracellular Stretch-sensitive channels in sensory nerves
- Organi tendinei del Golgi: offre un'informazione riguardo la tensione esercitata dal muscolo. Formato da una serie di filamenti di collagene che sono intrecciati con i terminali dell'assone delle fibre sensoriali, quando aumenta una tensione a livello del muscolo produce uno stiramento delle fibre di collagene che vanno a schiacciare le fibre nervose, che determinano una depolarizzazione con la trasmissione del segnale. Tanto più aumentata la forza generata al muscolo tanto più è grande la risposta della fibrocellula dell'assone associata all'organo tendineo del Golgi. - Muscle fibers Ib afferent axon -Capsule Ib axon Collagen fiber - -Tendon 250 μm
- Recettori della capsula articolare: simili ai recettori di Ruffini, rispondono solo quando l'articolazione raggiunge il limite massimo di flessione o estensione.
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
