Architetture e Programmazione di Controllori Industriali, Unimore
Slide da Unimore Università degli Studi di Modena e Reggio Emilia su Architetture e Programmazione di Controllori Industriali. Il Pdf, pensato per l'università e la materia Informatica, esplora la trasformata di Laplace e la stabilità dei sistemi, fornendo definizioni e schemi esplicativi.
Mostra di più27 pagine

Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
Modi Trasformata di Laplace
Recap
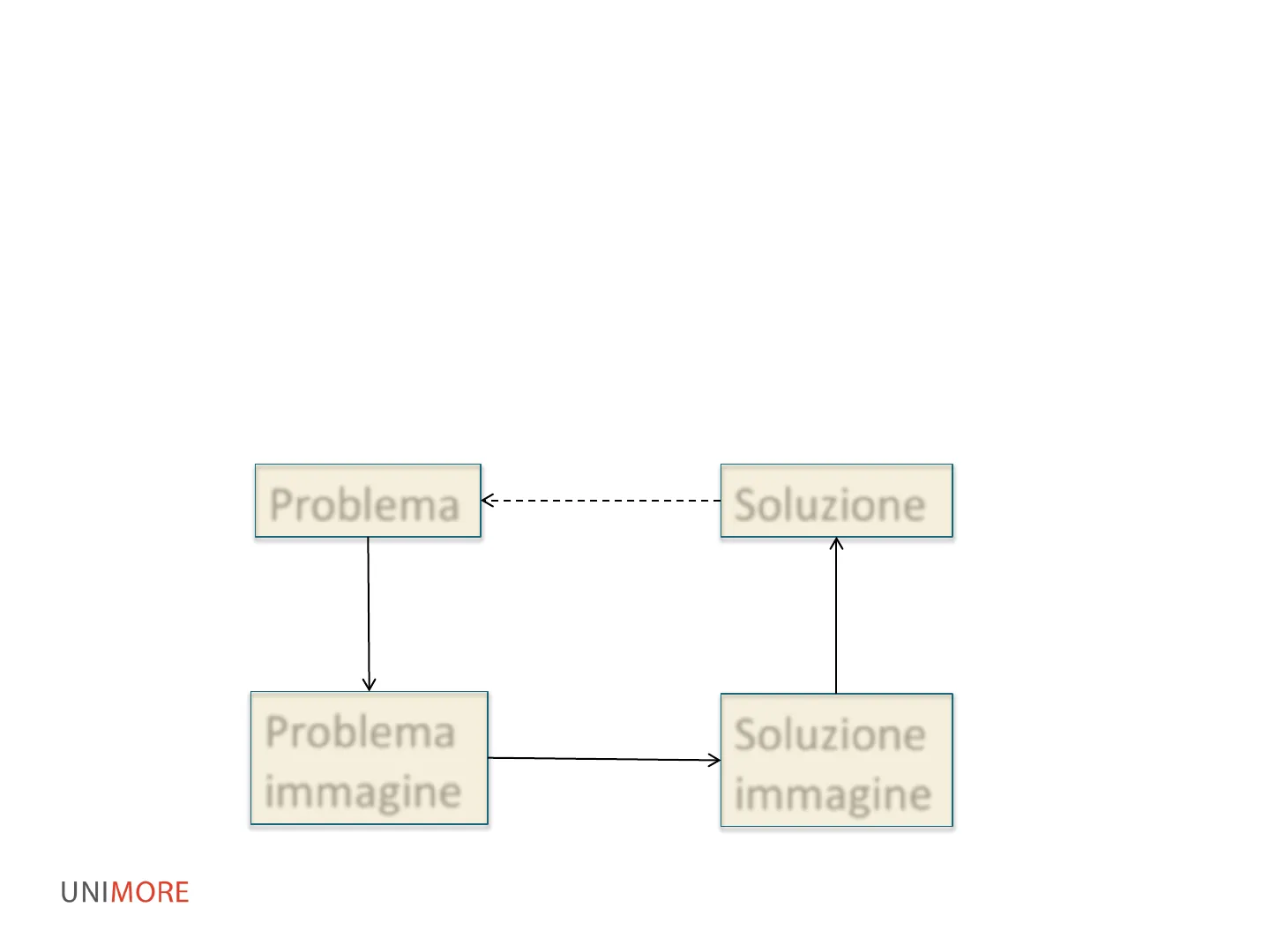
Mediante la trasformazione di Laplace un'equazione differenziale nel dominio del tempo si trasforma in un'equazione algebrica, di più semplice soluzione, nel dominio complesso.
Problema Soluzione Trasformata di Laplace Antitrasformata di Laplace Problema immagine Soluzione immagine
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Antitrasformata di Laplace
Funzioni razionali fratte
Data: F(s) = P(s) Q(s) = bmsm + bm-1sm-1 + ... + b1s + bo sn + an-1sn-1 + ... + a1s + do
Allora possiamo riscriverla come: F (s) = K (s-Z1)(s-Z2) ... (s -Zn) (s-P1)(s-p2) ... (s - Pn)
Dove K è un opportuno coefficiente detto: guadagno. I poli p1, P2, ... , Pn possono essere:
- semplici, ossia p; # pj, per ogni coppia di indici i e j (molteplicità = 1).
- multipli, ossia esiste almeno una coppia di indici i e j per i quali si ha pi = Pi (molteplicità > 1).
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Poli semplici
F(s) =- + R S i=1 k s - Pi Ri + l i=1 Ui + jvi S - oi - jWi + ui - jvi S-oi + jwi
Dove: Il primo termine - S R si riferisce ad un eventuale polo nell'origine. La sommatoria Ei=1 Ri si riferisce ai termini del primo ordine, che sono relativi ai poli reali non nulli, in numero pari a k. s-Pi La sommatoria Zi=1 S-Oi-jwi s-o¡tjwil Uitjvi + ui-jvi si riferisce ai termini del secondo ordine, che sono relativi a coppie di poli complessi coniugati, in numero pari a l.
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Poli multipli
Se si considera il caso in cui una radice del denominatore ha molteplicità pari a r: P(s) P(s) F (s) = Q(s) = (s-P1)(s-p2)(s -pi)" (s -Pn)
Allora: F(s) = R1 (s-P1) + (s-P2) R2 + ... + RI - + Ai,1 (s - Pi) + Ai,2 Air (s - P1) (s-Pi)2 + ... + (s - Pi)™
In cui i primi l termini si riferiscono a poli n - r semplici, e i restanti r termini si riferiscono al polo pi avente molteplicità r.
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Poli multipli
F (s) = R1 (s-P1) + (s- P2) R2 + ... + RI (s-pi) (s-pi) (s-pi)2 Ai,1 Ai,2 + ... + (s - Pi)™ Ai,r
Si ha: Ai,1 = (s - Pi) P(s) Q(s) S=Pi Air-1 = ds d (s - Pi)" 1 d2 (s - Pi)™ P(s) Q(s) P(s)] Q(s) S=Pi 1 dr-1 Ai,1 = (r - 1)! dsr-1 (s - Pi)™ P(s) Q(s) S=Pi
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Poli multipli
Per un generico k - esimo coeficiente Air-k, relativo al polo di molteplicità r e per il quale k = 0,1, ... , r - 1 ,si ha: Air-k = 1 dk k! dsk (s - Pi)" P(s) Q(s) S=Pi
Una volta calcolati i residui, la f(t) si calcola antitrasformando ciascun fratto semplice della F(s), ricordando che: [neat] = n! (s-a)n+1
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Poli e zeri
Esempio
Sia il sistema riconducibile alla formula: Y(s) = G(s)U(s)
Dove 3 U(s) = s(s + 1) E G(s) = s + 2 s2 + 4s + 6 s+ 2 (s+2+jv2)(s+2-jv2)
Allora Y(s) = S+2 (s+2+jv2)(s+2-jv2) s(s+1) 3 (s+2+jV2)(s+2-jv2)s(s+1) 3(s+2) R3 + R1 = Ry + R2 (s+1) (s+2+jv2) + (s+2-jv2) * 02
I poli dell'uscita sono dati dall'unione dei poli della funzione di trasferimento e di quelli dell'ingresso.
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Esempio
Per il sistema: Y(s) = G(s)U(s)
U(s) = s(s+ 1) 3 G (s) = s + 2 s2 +4s + 6 s + 2 (s +2+jv2)(s +2-jv2)
Allora + (s + 2- jv2) * ( ) = 2 + (5 + 1 (s + 1) + R (s + 2 + jv2)
La funzione nel tempo sarà: f(t) = R1 + R2e-t + 2pe-2tcos(v2t +0)
Dove: R1 + R2e-t sono i poli dovuti all'ingresso; 2pe-2t cos(v2t + 0) sono i poli del sistema. La funzione di trasferimento influenza l'uscita mediante i suoi poli.
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Modo di un sistema
Definizione
Si definisce modo di un sistema: l'antitrasformata di ciascun fratto semplice in cui viene decomposta la funzione di trasferimento del sistema.
Insieme all'ingresso, i modi del sistema caratterizzano la risposta del sistema.
UNIMORE 24/10/2023 Architetture e Programmazione di Controllori Industriali
Definizione
La risposta, nel dominio del tempo, di un sistema Lineare Tempo Invariante (LTI) consiste nella somma di modi, che sono del tipo: R, Rept, Reot cos(wt + 0) in corrispondenza di poli di molteplicità pari a uno.
Rth, Rthept , Rtheot cos(wt + 0) h = 0,1, ... ,r -1 in corrispondenza di poli di molteplicità r maggiore di uno.
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Poli semplici
p=o+iw Keot K eot cos(@t +0) 5 3 4.5 4 3.5 o= 0 1 3 o>0 f(t) 2.5 2 1.5 o= 0 1 0.5 σ< 0 0 0 2 4 6 8 10 0 2 4 6 8 10 Per poli reali = p = 0 Per poli complessi p = o + iw
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Definizione
Il comportamento dei modi è legato alla posizione dei poli in rapporto all'asse immaginario:
POLI SEMPLICI R, Rept, Reot cos(wt + 0) 0 0<0 limitati o = 0 ∞ 0>0
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Modo di un sitema
Definizione
Il comportamento dei modi è legato alla posizione dei poli in rapporto all'asse immaginario
POLI MULTIPLI Rth, Rthept , Rtheotcos(wt + 0) 1 0 0<0 t>8 00 0 ≥0
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Poli semplici
Kti eot Kti eot cos(œt + 9) 2.5 2 g<0,i=2 1.5 1 0.5 f(t) 0 -0.5 -1 -1.5 -2 0 0 2 4 6 8 10 0 2 4 6 8 10 Tempo (sec) Tempo (sec)
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Recap
I modi di un sistema rimangono limitati se e solo se la funzione di trasferimento non presenta alcun polo a parte reale positiva e gli eventuali poli a parte reale nulla sono semplici, divergono in caso contrario.
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Recap
I sistemi LTI possono presentare un'uscita che diverge al crescere del tempo. Questa condizione si può verificare anche se l'ingresso non è illimitato, poiché è determinata solo dai modi (che sono l'antitrasformata della FDT). Un sistema che presenta tale comportamento viene detto instabile.
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Stabilità
Definizione
La posizione dei poli della funzione di trasferimento (i poli del sistema) rispetto all'asse immaginario determina la STABILITÀ del sistema, ovvero la capacità del sistema di riportarsi in una configurazione di quiete dopo una perturbazione, di durata limitata, dello stato iniziale.
E possibile dimostrare che per i sistemi LTI il comportamento in corrispondenza all'applicazione di una perturbazione (ingresso) non dipende né dall'ampiezza della perturbazione, né dal tempo di applicazione. La stabilità è una proprietà del sistema
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Definizione
Dopo un perturbazione dello stato iniziale, un sistema LTI può presentare tre comportamenti diversi:
- Risposta limitata: esiste una costante M tale per cui: ly(t)| ≤ M Vt ≥0
- Risposta divergente: non esiste nessuna costante M che verifichi la condizione precedente
- Risposta che converge asintoticamente a 0: esiste una costante M che verifica la condizione precedente e inoltre: lim |y(t)| = 0 t-80
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Definizione
La stabilità di un sistema è definita in riferimento a queste tre condizioni Risposta limitata Sistema stabile Risposta divergente Sistema instabile Risposta che converge asintoticamente a 0 Sistema asintoticamente stabile
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Definizione
È possibile collegare il comportamento di un sistema LTI alla posizione dei suoi poli nel piano complesso.
Sulla base della posizione, nel piano complesso, delle radici del polinomio a denominatore della funzione di trasferimento di un sistema LTI, si può affermare che:
- condizione necessaria e sufficiente per la stabilità di un sistema LTI è che la sua funzione di trasferimento abbia solo poli a parte reale negativa o nulla, e quelli a parte reale nulla siano con molteplicità pari a uno;
- condizione necessaria e sufficiente per la stabilità asintotica di un sistema LTI è che tutti i poli della sua funzione di trasferimento siano a parte reale strettamente negativa.
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Definizione
La stabilità di un sistema è definita in riferimento a queste tre condizioni Risposta limitata Sistema stabile Poli a parte reale negativa o nulla (se nulla, con molteplicità = 1) Risposta divergente Sistema instabile Poli a parte reale positiva o nulla (se nulla, con molteplicità > 1) Risposta che converge asintoticamente a 0 Sistema asintoticamente stabile Poli a parte reale negativa
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Bounded input bounded output (BIBO)
Un sistema LTI inizialmente in quiete si dice caratterizzato da stabilità ingresso limitato uscita limitata (BIBO) se ad ogni segnale di ingresso u(t) limitato presenta un'uscita y(t) limitata: VN |u(t)| ≤N <0,t≥to -> EMt.c. ly(t)| ≤M
Un sistema LTI inizialmente in quiete, descritto da funzione di trasferimento W(s) razionale fratta, è stabile BIBO se e solo se tutti i poli della W (s) hanno parte reale strettamente negativa. Stabilità Asinitotica Stabilità BIBO
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Derivazione di Modelli matematici
BIBO Moto Rettilineo
Essendo: u(t) = F(t) y(t) = x(t) x(t) = x(t) F(t) M x(t)
La funzione di trasferimento è: G(s) = Y (s) U(s) = 1 Ms + b
Ha quindi un polo: p = - M b
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
