Architetture e Programmazione di Controllori Industriali con Antitrasformate
Slide da Unimore Università degli Studi di Modena e Reggio Emilia su Architetture e Programmazione di Controllori Industriali Antitrasformate. Il Pdf è una presentazione universitaria di Informatica che ripassa la trasformata di Laplace e analizza i poli complessi coniugati, utile per studenti universitari.
Mostra di più32 pagine

Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
Antitrasformate Trasformata di Laplace
Recap
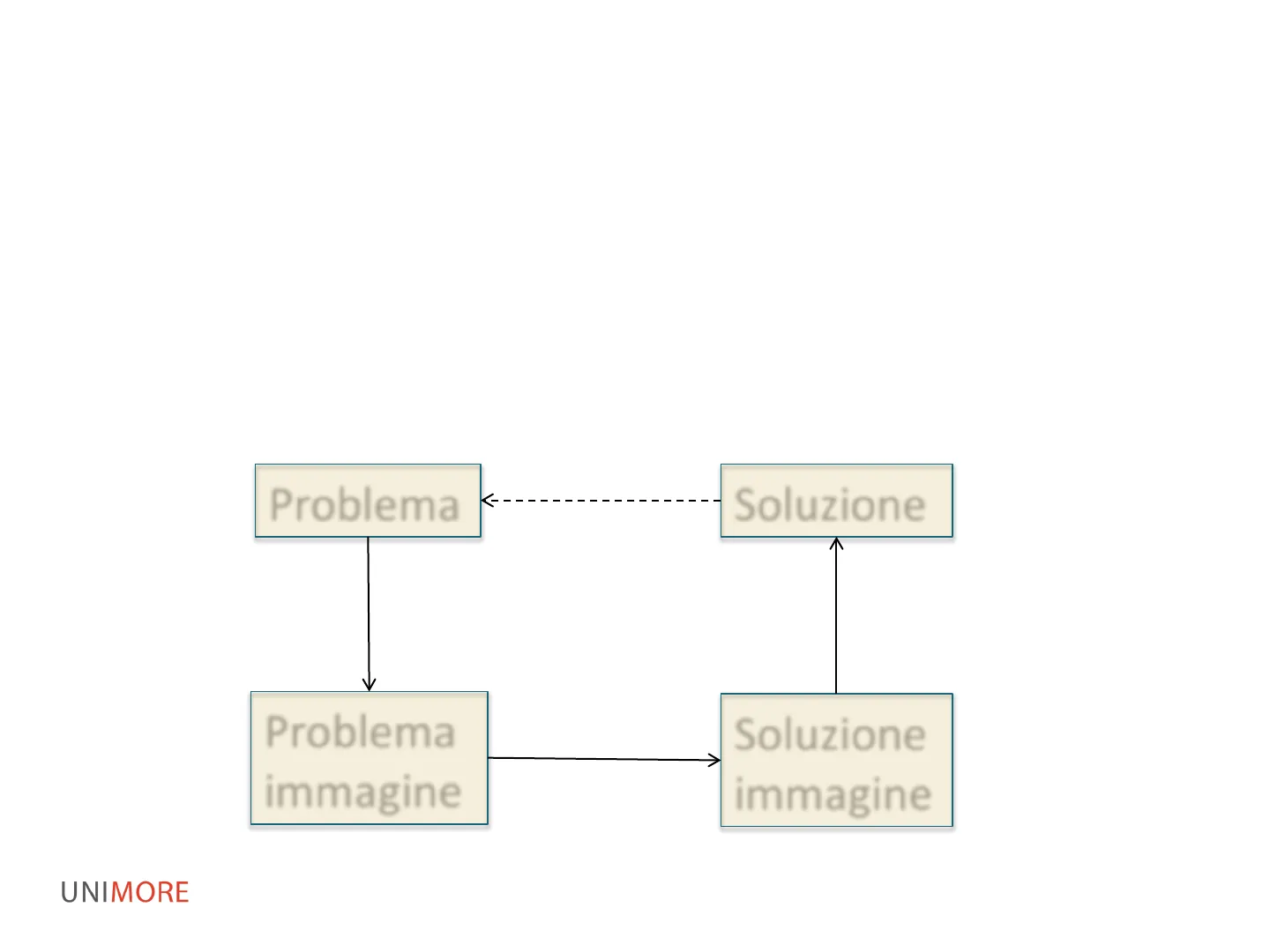
Mediante la trasformazione di Laplace un'equazione differenziale nel dominio del tempo si trasforma in un'equazione algebrica, di più semplice soluzione, nel dominio complesso.
Problema Soluzione Trasformata di Laplace Antitrasformata di Laplace Problema immagine Soluzione immagine
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 2
Trasformata di Laplace
Dal dominio complesso a quello temporale
Dove: [ [f(t)] a+jT f(t) = 1 1 lim 2Tf T->0 'a-jT F (s) eST ds f(t) F(s) C-1 [F(s)] è utile vincolare gli ingressi considerando solo alcune classi di segnali
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 3
Trasformata di Laplace
Dal dominio complesso a quello temporale
La determinazione della risposta in evoluzione libera e della risposta forzata di un sistema lineare e stazionario, nel dominio del tempo, si può ottenere mediante l'antitrasformata delle funzioni:
Zfo bi si Y(s) = i=0 i=o aisi U(s) + Et oai Σ'osiy(i-i-1) (0) i=0 Evoluzione forzata Evoluzione libera
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 4
Trasformata di Laplace
Antitrasformata di funzioni razionali
Considerando il termine Efobi si U(s) Possiamo considerare U (s) come rapporto di polinomi in s se u(t) è un ingresso canonico. Allora l'antitrasformata sarà del tipo:
n! L[tne-at] = (s + a)n+1
UNIMORE 19/10/2023 Architetture e Programmazione di Controllori Industriali 5
Trasformata di Laplace
Antitrasformata di funzioni razionali
Mentre il termine Li-o ai Zizo sjy(i-j-1) (0-) i=0 È un rapporto di polinomi in s ,dividendo numeratore e denominatore per a =1, si ha:
F (s) = P(s) Q(s) = bmsm + bm-1sm-1 + ... + bis + bo m-1 sn + an-isn-1 + ... + as + ao Ossia funzioni razionali fratte.
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 6
Trasformata di Laplace
Segnali canonici
La trasformata di Laplace dei segnali canonici è data dal rapporto si due polinomi, di conseguenza l'uscita è data dal rapporto di due polinomi.
Y(s) = F (s)U(s)
| F(s) | f(t) |
|---|---|
| 1 | 8(t) (impulso unitario in t = 0) |
| 1 | S |
| 1 | tu(t) (funzione rampa) |
| 1 | 1 |
| n-1 | (n-1)! |
| 1 | -as |
| u(t-a) (gradino unitario in t = a) | S |
| 1 | 1 |
| 1 | 1 |
| s+a' | 1+ts |
| T | 1 |
| 1 | 1 |
| 1 | 1 |
| m-le | (sta)n' |
| (1 +ts)" | (n-1)! |
| T" (n-1)! | 1 |
| 1 | 1 |
| -(1-e-ª1), | 1-e- |
| 1 | 1 |
| (e " - e br) | (s+a) (s+b) |
| b-a | 1 |
| (e +1 - e +2) | (1 +[]s) (1+t2s) |
| 1 | (α-a)e at - (a-b)e bt) |
| (s+a) (s+b) | b-a |
| 1+Ts | 1 |
| 1 | 1 |
| (1 +T1s) (1+[2s) | τι - τ2 |
| 3 | sen ot |
| $2+@02 | S |
| cos @t | $2+ 002 |
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 7
eur , -e i s (s+a)' s(1+ts) 1 tn-Ip-at u(t) (gradino unitario in t = 0) $2
Antitrasformata di Laplace
Funzioni razionali fratte
F (s) = P(s) Q(s) = bmsm + bm-1S m-1 + ... + bis + bo sn + an-1sn-1 + ... + ans + ao n-1 La differenza n-m tra il grado del polinomio al denominatore e il grado del polinomio al numeratore è detta grado relativo di F(s).
- Funzioni razionali fratte con un grado relativo negativo corrispondono a sistemi o segnali anticipativi fisicamente non realizzabili.
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 8
Antitrasformata di Laplace
Funzioni razionali fratte
Data una funzione razionale fratta:
F (s) = P(s) Q (s) L'equazione: $(s) = s" + an-1sn-1 + ... + ans + ao=0 E detta equazione caratteristica di F (s) la quale ha: p1, P2, ... , Pa radici reali o complesse (coppie coniugate).
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 9
Antitrasformata di Laplace
Funzioni razionali fratte
Allora: $(s) = sn + an-1sn-1 + ... + a1s + ao Può essere scritta come: ¢(s)= (s-p1)(s-p2) ... (s-Pn) P(s) F(s) = Q(s) È possibile scrive F(s) in forma fattorizzata:
F(s) = P(s) Q(s) = K (s-Z1)(s-Z2) ... (s - Zn) (s-p1)(s-p2) ... (s -Pn) Dove K è un opportuno guadagno.
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 10
Antitrasformata di Laplace
Funzioni razionali fratte
- Le radici:Z1, Z2, ... , Zn di P (s) sono dette ZERI di F (s).
- Le radici:p1, P2, ... , Pn di Q (s) sono detti POLI di F (s).
- Una funzione razionale è completamente determinata, a meno di un fattore costante K, una volta assegnati i suoi zeri e i suoi poli.
UNIMORE 19/10/2023 Architetture e Programmazione di Controllori Industriali 11
Antitrasformata di Laplace
Funzioni razionali fratte: esempi
F(s) = 2s+4 s2+4s+3 2(s+2) = (s+1)(s+3) Zeri: z = - 2 Poli: p1 = - 1, p2 =- 3
F(s) = s2+6s+5 s3+2s2+16s (s+1)(S+5) - s(s+1+jv15)(s+1-jv15) Zeri:z1 =- 1, z1 =- 5 Poli: p1 = 0, p2 = - 1- jv15, P2 = - 1+ jv15
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 12
Antitrasformata di Laplace
Funzioni razionali fratte
Se F(s) è una funzione razionale fratta strettamente propria (cioè il grado relativo > 0: il grado del polinomio a numeratore è inferiore a quello del denominatore. Si può, una volta calcolate le n radici del polinomio al denominatore, scomporre il rapporto di polinomi in una somma di n termini aventi a numeratore una costante e a denominatore un fattore binomio in s (fratti semplici o frazioni parziali), che risultano facilmente antitrasformabili:
F(s) = P(s) = Q(s) (s-p1)(s-p2) ... (s -Pn) P(s) Non è necessario calcolare le radici del numeratore!
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 13
Antitrasformata di Laplace
Funzioni razionali fratte
P(s) F (s) = P(s) = Q(s) (s-P1)(s-p2) ... (s - Pn) Per antitrasformare F(s) si possono avere due casi:
- Tutti i poli sono semplici, ossia pi = p;, per ogni coppia di indici i e j (molteplicità = 1).
- Vi sono poli multipli, ossia esiste almeno una coppia di indici i e j per i quali si ha pi = Pi (molteplicità > 1).
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 14
Antitrasformata di Laplace
Residui
Lo sviluppo della funzione F(s) in fratti semplici nel caso di poli tutti distinti porta alla seguente relazione
P(s) P(s) i=1 n Ri F (S) = Q(S) = (s-P1)(s -p2) ... (s - Pn) = S - Pi nella quale le costanti R;, ciascuna relativa al polo pi, sono dette residui, e sono:
- reali, in corrispondenza a poli reali;
- a coppie complesse coniugate in corrispondenza di coppie di poli complessi coniugati.
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 15
Antitrasformata di Laplace
Poli semplici calcolo dei residui
R¡ è il residuo associato al polo pi (i=1, ... ,n)
Ri = ( s - pi ) P(s) Q(s) S=Pi P(Pi) Ri = (Pi - P1) (Pi - P2) ... (pi - Pi-1) (Pi - Pi+1) ... (Pi - Pn)
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 16
Antitrasformata di Laplace
Poli semplici calcolo dei residui
Essendo:
n F (s) = Ri s - Pi i=1 E anche: L-1 = s - a. 1 eat - la funzione F(s) si antitrasforma, se posta in forma di fratti semplici:
f(t) = > RiePit i=1 n J
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 17
Antitrasformata di Laplace
Esempio
Sia F(s) = 5s+3 (s+1)(s+3)s(+2) K (s+1) + (s+2) + K3 K2 (s+3) Allora i residui saranno:
K2= = 7 (s =- 2) K3= 5(-2)+3 (-2+1)(-2+3) 5(-3)+3 =- 6 (s =- 3) F (s) = -1 (s+1) + (s+2) 7 (s+3) 6 Essendo l'antitrasformata: [-1 1 = eat s-a f(t) =- e-t + 7e-2t - 6e-3t
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 18
K1 = (-3+1)(-3+2) 5(-1)+3 (-1+3)(-1+2) =- 1 (s =- 1)
Antitrasformata di Laplace
Esempio
5s+3 F(s) = (s+1)(s+3)s(+2) f(t) =- e-t + 70-2t - 6e -3t
f(t) 0.7 0.6 0.5 0.4 ₴ 0.3 0.2 0.1 0 -0.1 0 2 4 6 8 10 Tempo (sec)
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 19
Antitrasformata di Laplace
Poli complessi coniugati
Dalla formula di Eulero: eil = cos(0) + i sin(0) Se nella funzione F (s) sono presenti coppie di poli complessi coniugati, nella sua antitrasformata vi saranno coppie di esponenziali complessi, moltiplicate per coefficienti ossia i residui, anche essi complessi coniugati.
- Applicando la formula di Eulero, si possono ridurre le coppie di esponenziali complessi ad esponenziali reali moltiplicati per funzioni trigonometriche.
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 20
Antitrasformata di Laplace
Poli complessi coniugati
Consideriamo, per semplicità, una funzione F(s) del tipo:
F(s) = s2 + as + ao 1 dove a1 e ao sono tali da dare luogo ad una coppia di poli complessi coniugati P1 = Oi + jWi, P2 = Oi - jWi = p ∗ I relativi residui sono anche essi complessi coniugati R1 = Ui + jvi, R2 = Ui - jvi = R1 ∗
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 21
Antitrasformata di Laplace
Poli complessi coniugati
Allora F(s) può essere scritta:
F(s) = R1 1 + R 2 S - P2 * R 1 S - P1 S- P1 + s - P1 * s-ơi-jwi 1 ui+jVi Ui-jvi + s-oi+jwi R Utilizzando la formula di Eulero: uitjvi = pele p = Vu, 2+ 0,2 0 = arctan ui Vi
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 22
Antitrasformata di Laplace
Poli complessi coniugati
Allora F(s) può essere scritta:
F (s) = Ui+jvi s-oi-jWi + Ui-jvi s-oi+jwi = p ej0 s-ơi-jWi + s-oi+jwi e-je Ricordando che L-1 1 = eat s-a cos(s) = ejs + e-js 2 Antitrasformando: f(t) = p(eit+j(w;+0) + e it-j(W;+0) = 2peitcos(W; +0)
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 23
Antitrasformata di Laplace
Esempio: Poli complessi coniugati
F(s) = 7s2 -8s + 5 s3 + 2s2 + 5s 7s2-8s+5 = R1 + R2 S+1-2j + R2* S+1+2j _= 1 S = = + 1 3+j4 S+1-2j S+1+2j Allora: p = 5 0 = arctan 4 3 4 f(t) = 1+10e-tcos |2t + arctan(2)
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 24
+ 3-j4 s3+s2+5s S
Antitrasformata di Laplace
Esempio: Poli complessi coniugati
f(t) = 1 + 10e-tcos 4 2t + arctan ) 3
f(t) 7 6 5 4 3 f(t) 2 1 0 -1 -2 -3 0 2 4 6 8 10 Tempo (sec)
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 25
Antitrasformata di Laplace
Poli complessi coniugati: recap
- Una funziona razionale fratta F(s), e quindi nel caso di interesse una funzione di trasferimento, è esprimibile sempre come rapporto di due polinomi.
- Nell'ipotesi che le radici del polinomio a denominatore presentino molteplicità pari a uno, una volta che la F(s) sia stata decomposta in fratti semplici, da luogo ad espressioni del tipo:
F(s) =- + R S i=1 K s - Pi Ri + ui + jvi i=1 l S - oi - jwi + S- Ơi + jWi Ui - jvi
UNIMORE 16/10/2023 Architetture e Programmazione di Controllori Industriali 26
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
