Prestazioni in salita degli aeromobili: equazioni di equilibrio e SEP
Documento dall'Università sulle prestazioni in salita degli aeromobili. Il Pdf esplora concetti chiave come SEP e SET, fondamentali per l'analisi delle prestazioni. Questo documento di Fisica, adatto per l'Università, include formule matematiche e grafici esplicativi, trattando anche le quote di tangenza e l'ottimizzazione del tempo di salita.
Mostra di più16 pagine

Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
Capitolo 12 Prestazioni in salita
Equazioni di equilibrio
Ipotesi operative
Le ipotesi principali considerate sono:
- Il volo è simmetrico, ovvero non ci sono deviazioni laterali o scivolamenti: 3 = 0
- Il moto avviene nel piano verticale, quindi: x = 0
- La spinta T è applicata al baricentro (CoG) e allineata con l'asse xB.
- L'angolo di attacco (a) è piccolo: a « 1
- La componente T sin & è trascurabile rispetto alla portanza L: T sina « L
- Il momento di inerzia attorno a yA, Jy, è costante.
Equazioni di Equilibrio
Nel sistema di riferimento aerodinamico (x4, zA), le equazioni di equilibrio sono:
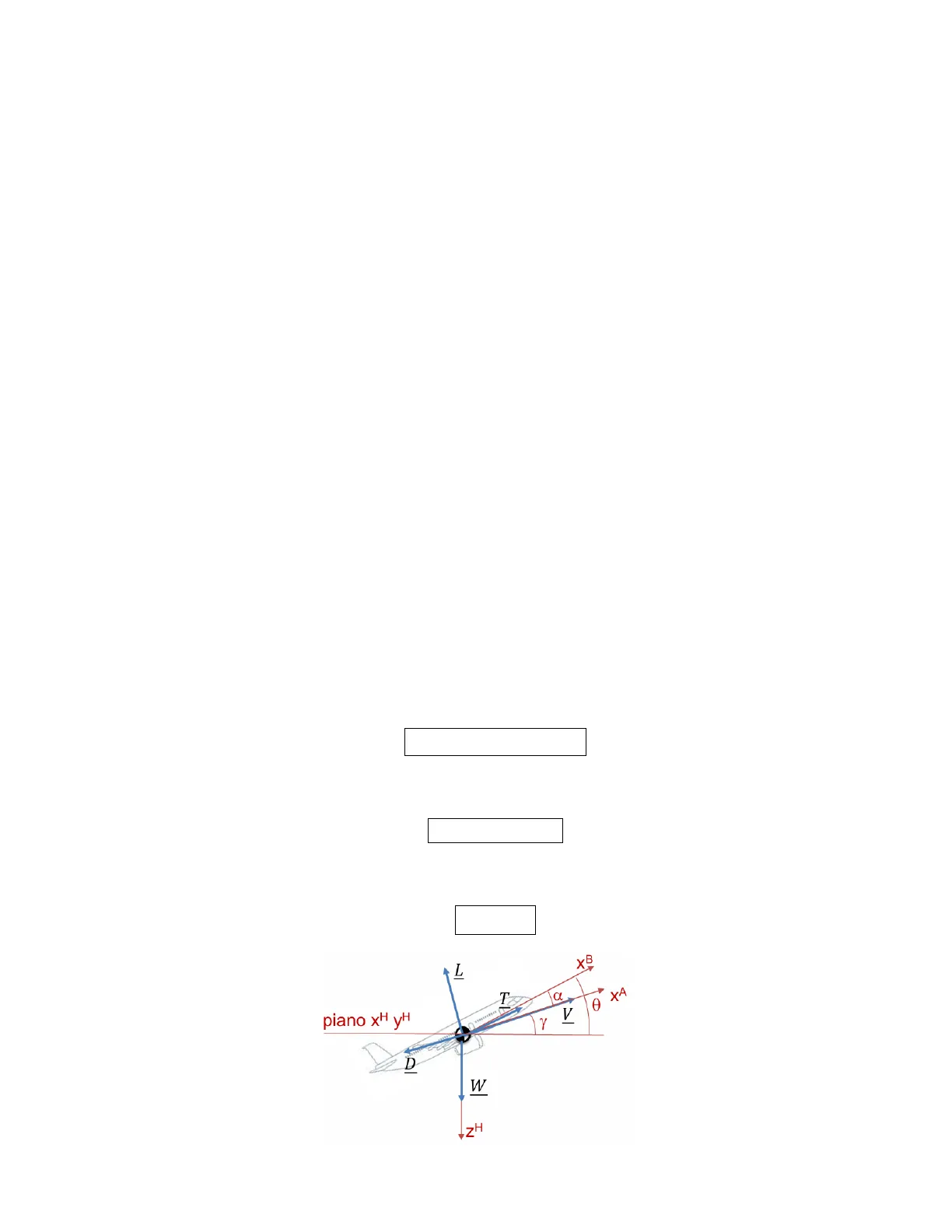
- Lungo x4: Il bilancio delle forze lungo l'asse x4 è dato da: mV =- D+T-W siny
- Lungo z4: Il bilancio delle forze lungo l'asse z4, considerando a « 1, è dato da: my= L - W cosy
- Attorno a y4: Il bilancio dei momenti attorno all'asse trasversale y4 è: JyÖ = MG XB L T a piano xH yH D W ZH 271272
CAPITOLO 12. PRESTAZIONI IN SALITA
Ipotesi aggiuntive: moto stazionario
Possiamo fare l'ipotesi di moto stazionario, e quindi avremo che: V == = 0 Le nuovi equazioni di equilibrio sotto queste ipotesi sono: T = D+ W siny L = W cos y MG=0
SEP e SET: indicatori di eccesso
Per analizzare le prestazioni del velivolo, si introducono due grandezze fondamentali:
- SEP (Specific Excess Power): indica la potenza in eccesso specifica disponibile, utilizzabile per guadagnare quota o aumentare la velocità verticale. SEP = H = h = Vy = PA - PR W
- SET (Specific Excess Thrust): indica la spinta specifica in eccesso, che permette di incrementare l'angolo di rampa (y). T - D SET = sin y = W
Osservazioni su sin y e velocità Verticale (Vu)
sin y = T - D W T(h, V, ỚT) - D(h, V, L) W T(h, V, ỚT) - D(h, V, W, y) W = = Vv = PA - PR W = = · · · PA(h, V, ST) - PR(h, V, W, Vu) W Sotto le ipotesi semplificative: y<1=>siny~y, cosy~1, L=W Le formule si semplificano ulteriormente: T(h, V, ỚT) - D(h, V, W) sin y = W Vu = PA(h, V, ỚT) - PR(h, V,W) W Grazie alle ipotesi semplificative, possiamo ritenere ancora validi i diagrammi di Pénau, analizzati in precedenza, che descrivono l'equilibrio tra potenza disponibile e potenza richiesta per diverse condizioni di volo.
Prestazioni
Le prestazioni che vogliamo ottimizzare sono 2:
- Massimizzazione della variazione di quota a pari spazio orizzontale percorso. L'obiettivo è massimizzare l'angolo y, che rappresenta la salita ripida, ovvero la massima variazione di quota rispetto allo spazio orizzontale percorso. L'angolo di salita y è definito come: T - D y = W max y = salita ripida273
12.2. PRESTAZIONI
- Minimizzazione del tempo per raggiungere una quota. L'obiettivo è massimizzare Vu, che rappresenta la salita rapida, ovvero minimizzare il tempo necessario per raggiungere una quota. La velocità verticale Vy è definita come: Vu = PA - PR W max Vv = salita rapida V XA Y 1ZH Figura 12.1: salita ripida V XA 000 Vy ZH Figura 12.2: salita rapida
Soluzioni grafiche
Salita ripida
1. formula del Massimo Angolo di Rampa: T - D y = - W Per ottenere il massimo angolo di rampa (max), è necessario massimizzare la differenza (T - D) rispetto alla velocità V. La condizione per il massimo è: ₴D ӘT Questa relazione implica che il massimo angolo di rampa si verifica quando il tasso di variazione della resistenza rispetto alla velocità è uguale a quello della spinta. 2. soluzione grafica: a) Grafico Superiore (T, D vs V):
- L'asse x rappresenta la velocità (V).
- L'asse y mostra la spinta (T) e la resistenza (D).
- La curva arancione rappresenta la spinta T, che varia con la velocità.
- La curva nera rappresenta la resistenza D, che cresce in modo non lineare con la velocità. Il massimo angolo di rampa si trova dove la distanza verticale tra T e D è massima. (b) Grafico Inferiore (y vs V):
- L'asse x rappresenta la velocità (V).
- L'asse y rappresenta l'angolo di rampa (y).
- La curva mostra y in funzione della velocità. I punti principali sul grafico sono:
- Vmin: velocità minima per il volo.
- Vymax: velocità alla quale si ottiene il massimo angolo di rampa (max).
- Vmax: velocità massima sostenibile dal motore.274
CAPITOLO 12. PRESTAZIONI IN SALITA
D,T Î D T V Y V min V maxY __ max Vv max > > > > max y / V V
Salita Rapida
1. Formula per la Velocità Verticale (Vu): La velocità verticale (Vu) è definita come: Vv = PA - PR W Per ottenere la massima velocità verticale (Vv,max), si deve massimizzare la differenza (PA - PR) rispetto alla velocità V. La condizione per il massimo è: OPA OPR Questa condizione implica che il massimo di Vy si verifica quando il tasso di variazione della potenza disponibile è uguale a quello della potenza richiesta. 2. Soluzione Grafica: (a) Grafico Superiore (PA, PR VS V):
- L'asse x rappresenta la velocità (V).
- L'asse y mostra le curve della potenza: - PA: potenza disponibile (curva arancione), che diminuisce con la velocità. - PR: potenza richiesta (curva nera), con un minimo in corrispondenza di una certa velocità.
- Il massimo di Vu si verifica dove la distanza verticale tra PA e PR è massima. (b) Grafico Inferiore (Vy vs V):
- L'asse x rappresenta la velocità (V).
- L'asse y mostra la velocità verticale (Vu).
- La curva rappresenta Vy in funzione di V, con i seguenti punti chiave: - Vmin: velocità minima per il volo. - Vy,max: velocità alla quale si ottiene il massimo angolo di rampa (y). - Vy,max: velocità alla quale si ottiene la massima velocità verticale. - Vmax: velocità massima sostenibile dal motore. 3. Relazione tra Vy,max e Vy,max: Dal grafico inferiore si osserva che: Vy, max ≤ Vy,max Questa relazione indica che la velocità alla quale si ottiene il massimo angolo di rampa è sempre minore o uguale alla velocità alla quale si ottiene la massima velocità verticale. PA, PR PA PB V VvÎ maxɣ V max275
12.2. PRESTAZIONI
4. Interpretazione:
- La velocità verticale massima (Vv,max) è utile per massimizzare il tasso di salita verticale, ad esempio per raggiungere rapidamente un'altitudine.
- La velocità di massimo angolo di rampa (V7,max) è più bassa ed è utilizzata per massimizzare il guadagno di quota per unità di distanza orizzontale, ad esempio per superare ostacoli vicini.
Soluzioni analitiche
Salita ripida, velivolo turbogetto
1. Obiettivo: Massimizzare y L'angolo di salita y è definito come: T - D W Per massimizzare y, la condizione ottimale si verifica quando: OD _OT Questo implica che il massimo valore di y corrisponde a un equilibrio dinamico tra la variazione della resistenza aerodinamica e della spinta rispetto alla velocità V. 2. Velocità ottimale per la salita ripida La velocità ottimale Vmaxy, che massimizza l'angolo di salita, è indicata anche come: Vmaxy = VminD = VmaxE = V SpCLmaxE W/S Dove CLmaxE = VCD0/K 3. Grafico delle curve di D e T rispetto a V Il grafico mostra la relazione tra la velocità V, la resistenza aerodinamica D, e la spinta T.
- L'asse orizzontale rappresenta la velocità V.
- L'asse verticale rappresenta D (resistenza) e T (spinta).
- I punti chiave sono: - Vmin: Velocità minima associata al regime di volo stabile, - Vmaxy: Velocità che massimizza l'efficienza di salita ripida, - Vmax: Velocità massima del velivolo. 4. Osservazione La massima efficienza di salita ripida dipende esclusivamente dall'aerodinamica del velivolo, ovvero dal rapporto tra la spinta T e la resistenza D, e non dalla propulsione in sé. D,T1 D T V min V maxy V max V276
CAPITOLO 12. PRESTAZIONI IN SALITA
Salita rapida, velivolo turbogetto
1. Formula per la Velocità Verticale (Vu): La velocità verticale (Vu) è definita come: Vy =- PA - PR W 2. Espressione di PA e PR: Per un velivolo turbogetto, le espressioni per PA e PR sono: PA= TV PR = 50V3SCDo + k7 2pVS W2 Dove k è un fattore di efficienza aerodinamica. La potenza richiesta (PR) è composta da:
- Una componente proporzionale a V3 (resistenza parassita).
- Una componente inversamente proporzionale a V (resistenza indotta). 3. Condizione per Vy,max: Per ottenere Vu,max, è necessario massimizzare la differenza (PA - PR) rispetto alla velocità (V). La condizione di massimo è: OPA av = av aPR 1/2 Vy,max = 3PSCDo T 1+1/1+3 min D T 2 4. Interpretazione Grafica: (a) Grafico di PA e PR:
- L'asse x rappresenta la velocità (V).
- L'asse y rappresenta la potenza: - PA: potenza disponibile (curva arancione), che cresce linearmente con V. - PR: potenza richiesta (curva blu), con un minimo in corrispondenza di Vmin.
- La differenza PA - PR determina Vu-
- Possiamo individuare i seguenti punti principali: - Vmin: velocità minima per il volo. - Vy,max: velocità corrispondente alla massima velocità verticale. - Vmax: velocità massima sostenibile dal motore. 5. Osservazioni:
- La velocità Vy,max dipende sia dall'aerodinamica (coefficiente di resistenza parassita CDo e fattore k) che dalla propulsione (spinta T).
- Un corretto bilanciamento tra potenza disponibile e potenza richiesta è essenziale per ottimizzare le prestazioni. PA, PR PR 1 PA 1 V min - V maxVv max - V >277
12.2. PRESTAZIONI
Salita rapida, velivolo motoelica
1. Massimizzazione di Vv La velocità verticale (Vv) è definita come: Vu = - PA - PR W Per massimizzare Vụ, la condizione ottimale si verifica quando: OPA OPR Questo definisce la velocità alla quale Vy è massimizzato, ovvero V.P. max Vu. 2. Velocità ottimale per la salita rapida (VPa, max Vu) La velocità ottimale per massimizzare Vy è data da: VP maxV2 = min PR = VP V ¿PCLmaxF W/S 3CD0 Dove CLmaxF V K 3. Grafico delle curve di PA e PR rispetto a V Il grafico mostra la relazione tra la velocità V, la potenza disponibile PA, e la potenza richiesta PR:
- L'asse orizzontale rappresenta la velocità V,
- L'asse verticale rappresenta PA (potenza disponibile) e PR (potenza richiesta).
- i punti chiave nel grafico sono: - VminPR: Velocità alla quale la potenza richiesta è minima, - VP maxV .: Velocità che massimizza Vy, coincidente con VminPR e VmaxF, - Vmax: Velocità massima del velivolo. 4. Osservazione La massimizzazione della velocità verticale (V) dipende esclusivamente dall'aerodinamica del velivolo, in particolare dal rapporto tra potenza disponibile e potenza richiesta, e non dalla propulsione. PA, PR PR PA min V max V VminPr = VmaxF = VmaxVv
Salita ripida, velivolo motoelica
1. Formula Generale per y: L'angolo di rampa y è espresso come: y = T - D W 2. Relazione tra Potenza e Forza: La tangente dell'angolo di salita può essere espressa in termini di potenza: tand = PA - PR V = W sin y
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
