La Forza Peso: definizione, formule e applicazioni in fisica
Documento di Scuola superiore sulla Forza Peso. Il Pdf presenta le definizioni e le formule delle forze fisiche principali: peso, elastica, attrito e Archimede, con esempi e illustrazioni. Questo materiale di Fisica è ideale per un ripasso o un primo approccio ai concetti.
Mostra di più8 pagine

Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
La Forza Peso
Definizione: la forza peso (chiamata anche "forza di gravità" oppure semplicemente "peso") è la forza con cui un corpo (= oggetto che subisce l'azione) è attratto dalla Terra (= oggetto che compie l'azione).
Modulo della Forza Peso
Modulo: Fp = m * g m = massa dell'oggetto (in kg) g = accelerazione di gravità sulla Terra = 9,8 m/s2 Direzione: perpendicolare alla superficie terrestre (cioè verticale rispetto al suolo) Verso: verso il centro della Terra (cioè verso il basso)
Origine della Forza Peso e Legge di Gravitazione Universale
L'origine di questa forza è legata alla massa degli oggetti, e viene descritta attraverso la Legge di Gravitazione Universale: se consideriamo due masse (= due oggetti con massa) tra esse si manifesta una forza attrattiva (= una forza che cerca di avvicinare tra loro gli oggetti) che dipende dalla massa stessa degli oggetti (m1 e m2) e dalla distanza che li separa (d). La Legge di Gravitazione Universale è la legge che spiega ad esempio il "funzionamento" del Sistema Solare. La formula della Legge di Gravitazione Universale è la seguente: Fg = costante x m1 . m2 d2
Forza Peso come Caso Particolare della Legge di Gravitazione Universale
Quando parliamo di forza peso stiamo considerando una situazione particolare della Legge di Gravitazione Universale, ovvero l'interazione tra la Terra e un qualunque altro oggetto: in questa situazione la massa della Terra (che potremmo identificare con m1) rimane costante. La distanza d viene valutata partendo dal centro della Terra, e quindi per calcolarla bisogna sommare il raggio della Terra e l'altezza a cui si trova l'oggetto in questione rispetto alla superficie terrestre (d = RT + h); poiché l'altezza h è molto più piccola di RT , la distanza d è praticamente uguale a RT. Perciò nella formula della Legge di Gravitazione Universale anche d è costante! Di conseguenza, nella Legge di Gravitazione Universale avremo dei termini sempre fissati (quelli evidenziati in rosso) che possiamo racchiudere in una costante g chiamata accelerazione di gravità della Terra: Fg = costante X m1 . m2 => Fp = m2 X g .
Valore dell'Accelerazione di Gravità
Il valore convenzionale dell'accelerazione di gravità è 9,8 N/kg (meglio ancora 9,8 m/s2 perché è una accelerazione) ed è il valore che useremo nei calcoli. Tuttavia, il valore di questa grandezza fisica può cambiare in modo significativo in base all'altitudine (perché cambia h) e alla latitudine terrestre (perché cambia RT), e dunque si possono avere valori leggermente differenti da quello convenzionale "9,8".
LA FORZA ELASTICA
Definizione di Forza Elastica
Definizione: la forza elastica è la forza che si manifesta quando un materiale viene deformato e vuole tornare alla sua forma iniziale (= "condizione di riposo"). Tale forza è applicata dal materiale (= oggetto che compie l'azione) su se stesso (= oggetto che subisce l'azione). La forza elastica è una forza di richiamo, cioè una forza che si manifesta per riportare l'oggetto alla condizione iniziale e che si oppone alla deformazione subita. Quando si parla della forza elastica si considera una molla come "prototipo" di oggetto elastico, e la Legge di Hooke come legge fisica per descrivere del comportamento elastico dei materiali.
Modulo della Forza Elastica
Modulo: FEL = k . Al k = costante elastica della molla (unità di misura: N/m) Al = variazione della lunghezza della molla (in metri) Direzione: coincide con la retta lungo la quale avviene la deformazione della molla Verso: opposta al verso della deformazione
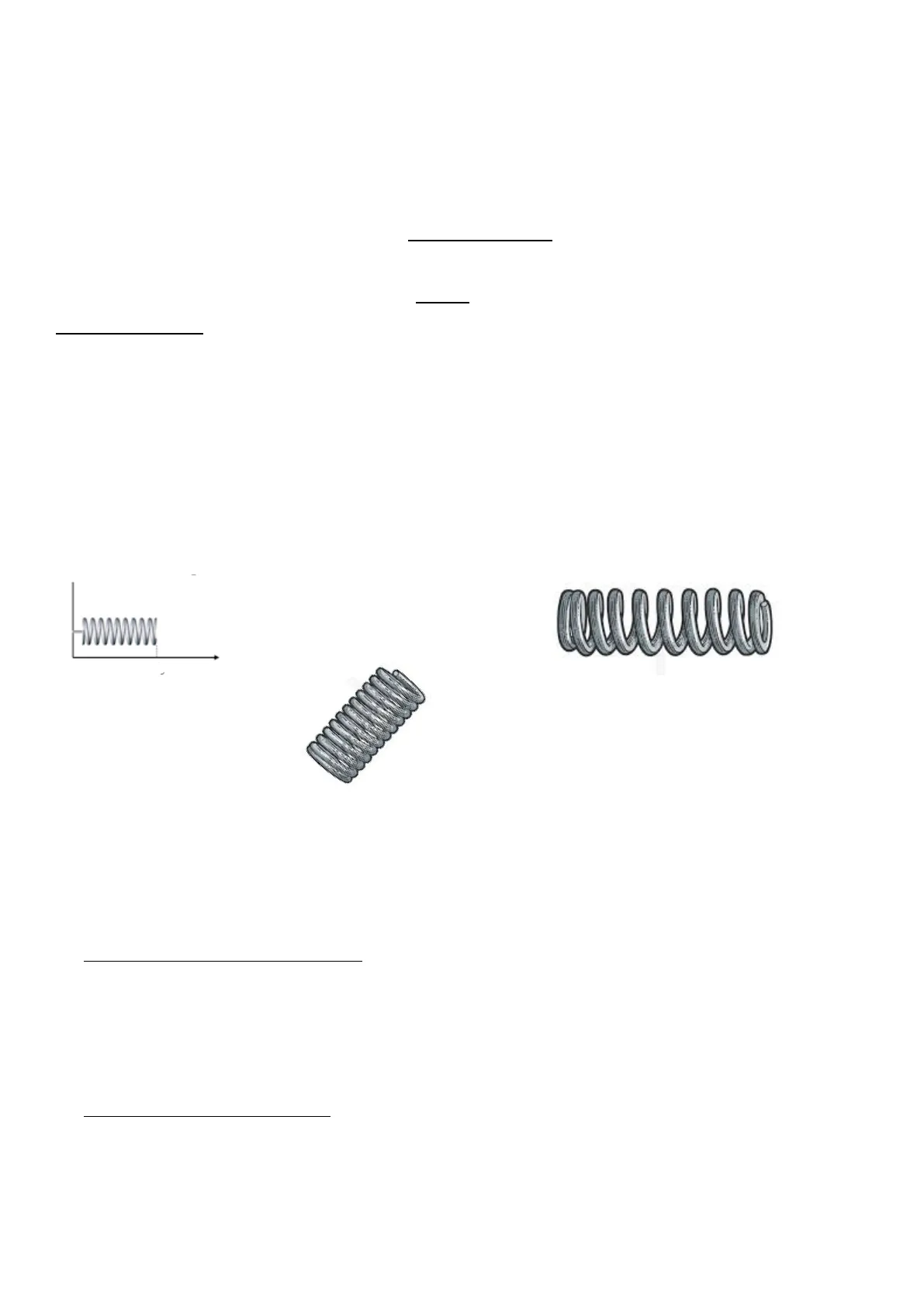
Esempi di Molle
Molla compressa Molla allungata dal lato destro Molla compressa
Deformazione degli Oggetti
Tutti gli oggetti possono essere deformati applicando ad essi una forza esterna (chiamata forza deformante); la forza elastica cerca di opporsi all'azione di tale forza deformante. La deformazione di un oggetto può essere: v temporanea oppure permanente: > è temporanea quando la forza elastica è in grado di riportare l'oggetto alla sua forma iniziale, e quindi il materiale segue la Legge di Hooke; > è permanente quando la forza elastica non riesce ad opporsi alla forza deformante, e allora diciamo che il materiale ha superato il limite di elasticità; v visibile oppure impercettibile: > la deformazione è visibile perché il materiale ha un comportamento elastico (= si deforma con facilità) > la deformazione non è visibile perché il materiale ha un comportamento rigido (= si deforma con difficoltà)
Condizioni della Legge di Hooke
Da queste informazioni possiamo capire che la Legge di Hooke descrive una situazione molto particolare !! Infatti la Legge di Hooke prevede che:
- la forza elastica sia sempre in grado di equilibrare la forza deformante, cioè in ogni istante queste due forze debbono essere uguali e contrarie (= stesso modulo, stessa direzione, verso opposto) => FEL = - FDEF
- la forza elastica sia direttamente proporzionale alla deformazione della molla, cioè se la deformazione della molla viene raddoppiata allora anche la forza elastica si raddoppia ATTENZIONE: DA ORA IN POI noi indicheremo la grandezza fisica "deformazione della molla" con il simbolo Al perché esso è il simbolo più corretto per indicare la variazione della lunghezza, in quanto essa significa "differenza tra lunghezza finale e lunghezza a riposo" Al = lFIN - LO
- la molla sia ideale, cioè abbia una massa trascurabile in modo che essa non vada ad influenzare l'effetto della forza deformante
- la forma geometrica della molla (lunghezza della molla, raggio delle spire, numero di spire) e il materiale di cui essa è fatta siano racchiuse in una grandezza fisica chiamata costante elastica della molla: il suo simbolo è k, la sua unità di misura è N/m; essa compare nella Legge di Hooke come la costante di proporzionalità tra la forza elastica e la deformazione della molla. La costante elastica della molla indica la facilità con la quale una molla riesce a deformarsi: se la molla è molto elastica (= si deforma facilmente) allora k avrà un valore piccolo (es: la molla della penna) > se la molla è molto rigida (= si deforma con difficoltà) allora k avrà un valore grande (es: l'ammortizzatore di un'automobile)
Formula della Legge di Hooke
La Legge di Hooke può essere scritta attraverso la formula FEL = - k · Al In essa, le grandezze fisiche forza elastica e deformazione sono indicate con il simbolo di vettore (poiché sono grandezze fisiche di tipo vettoriale), mentre la costante elastica è una grandezza scalare. Possiamo riconoscere che la Legge di Hooke è una operazione tra vettori: il vettore FEL è la moltiplicazione di un vettore Al per uno scalare -k, e questo giustifica le proprietà del vettore forza elastica (modulo, direzione e verso) che abbiamo dichiarato all'inizio. Le molle, e i materiali in generale, seguono la Legge di Hooke fintanto che la forza deformante non ha un valore eccessivo oppure finché essa non viene applicata in modo brusco; quando un materiale non rispetta più la Legge di Hooke diciamo che esso ha superato il limite di elasticità.
LA REAZIONE VINCOLARE
Definizione di Reazione Vincolare
Definizione: la reazione vincolare è la forza che una superficie solida (= oggetto che compie l'azione) applica ad un oggetto poggiato sopra di essa (= oggetto che subisce l'azione) allo scopo di evitare che tale oggetto sprofondi all'interno della superficie stessa. Una superficie di appoggio può applicare reazioni vincolari con valori diversi: v a seconda della massa dell'oggetto y a seconda delle forze che complessivamente premono sulla superficie e cercano di far sprofondare l'oggetto. Diremo che la reazione vincolare è una forza in grado di creare una condizione di equilibrio nella direzione perpendicolare alla superficie di appoggio.
Modulo, Direzione e Verso della Reazione Vincolare
Modulo: il suo valore è uguale alla forza che complessivamente preme l'oggetto contro la superficie ("forza premente") Direzione: perpendicolare alla superficie di appoggio Verso: verso l'esterno della superficie
Vincoli in Fisica
Un vincolo è una struttura che impedisce il movimento di un oggetto in una o più direzioni; per fare ciò vengono applicate forze (e momenti meccanici) all'oggetto in questione in modo da opporsi ad un certo movimento (traslazione e/o rotazione). In Fisica esistono vari tipi di vincoli, classificati in base al numero di movimenti che essi sono in grado di impedire; per il momento noi consideriamo solo il caso del vincolo semplice = piano di appoggio, poiché esso impedisce la traslazione nella direzione perpendicolare al piano, mentre consente il movimento in direzione parallela al piano e anche la rotazione; Ogni superficie di appoggio è in grado di applicare una reazione vincolare fino ad un valore massimo chiamato carico di rottura: se la forza richiesta supera il carico di rottura la superficie non è in grado di opporsi alla forza premente e l'oggetto sprofonda all'interno della superficie.
LA FORZA DI ATTRITO RADENTE
Definizione di Forza di Attrito Radente
Definizione: la forza di attrito radente è la forza che si manifesta quando un oggetto solido (= oggetto che subisce l'azione) striscia (= scivola) sopra una superficie solida (= oggetto che compie l'azione). La forza di attrito radente ostacola il moto degli oggetti, e si suddivide in: V attrito statico: si manifesta quando l'oggetto rimane fermo (anche se ci sono forze che cercano di farlo muovere), cioè la forza di attrito statico impedisce il movimento; / attrito dinamico: si manifesta quando l'oggetto è in movimento e la forza di attrito dinamico ostacola il movimento rallentando l'oggetto.
Modulo della Forza di Attrito Radente
Modulo: Fattr = p . Rv che poi diventano Fattr,s = Hs . Ry per calcolare la forza di attrito statico Fattr,D = UD . Rv per calcolare la forza di attrito dinamico › nella formula è presente la reazione vincolare perché essa ha lo stesso valore della forza premente (nel libro si parla infatti di "forza premente", MA negli esercizi che ci aspettano è più utile ragionare con la reazione vincolare) > I (lettera alfabeto greco, si legge "MU") = coefficiente di attrito (statico oppure dinamico), il quale dipende dalla coppia di materiali che vengono posti a contatto Direzione: parallela alla superficie di appoggio Verso: opposto a quello del moto
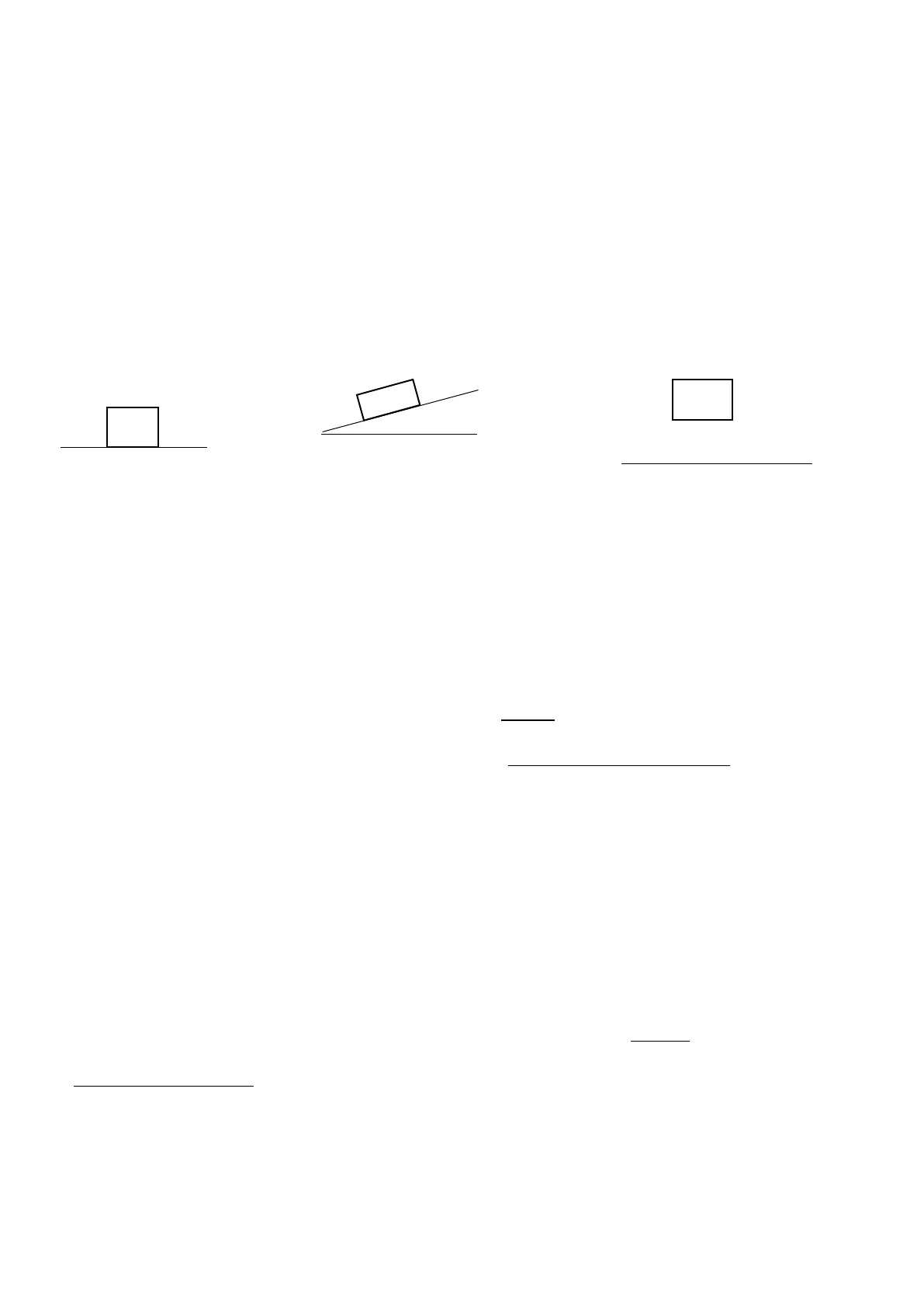
Esempi di Verso del Moto
oggetto va a dx oggetto scende oggetto sale in verticale oggetto va a sx oggetto sale oggetto cade
Origine Microscopica della Forza di Attrito Radente
La forza di attrito radente ha una origine microscopica: essa è legata all'interazione degli atomi che formano i due materiali, i quali interagiscono per impedire il movimento reciproco dei due materiali. Ma a livello macroscopico (= nei nostri esercizi) le caratteristiche di questa interazione microscopica vengono racchiuse nel valore del coefficiente di attrito u (che è un numero senza unità di misura !! ). Abbiamo anche visto che esistono due coefficienti di attrito ( us e uD ) i quali hanno valori diversi a seconda della situazione di attrito statico oppure di attrito dinamico ( UD < us < 1 ). Questa differenza di valori dipende dal fatto che la forza di attrito statico è maggiore rispetto a quella di attrito dinamico: se consideriamo un oggetto fermo, ad esempio il tavolo della cucina, noi sappiamo che per mettere in movimento il tavolo dobbiamo applicare una forza che abbia un valore ben preciso (e finché la forza da noi applicata non ha quel valore il tavolo non si muove e "sentiamo" la forza di attrito statico che impedisce il movimento!). Ma quando la nostra forza ha il "valore giusto" allora il tavolo inizia a muoversi e da quel momento in poi agisce la forza di attrito dinamico (che si oppone al movimento) ma la sensazione che proviamo è di essere "meno ostacolati" rispetto a quando il tavolo era fermo.
Forza di Primo Distacco
Si chiama forza di primo distacco la forza esterna che deve essere applicata parallela al piano di appoggio e nel verso del moto per vincere la situazione di attrito statico; essa ha lo stesso valore della forza di attrito statico quindi conoscendo la forza di primo distacco (perché ad esempio la misuriamo con il dinamometro) possiamo conoscere il valore della forza di attrito statico.
Altre Forze di Attrito
In natura esistono anche altre forze di attrito, legate a situazioni differenti di movimento:
- forza di attrito volvente: si manifesta quando un oggetto solido ruota/rotola a contatto con una superficie solida; anche questa forza di attrito dipende dalla coppia di materiali posti a contatto (esempi: la palla che rotola sul pavimento; la porta che ruota sul suo cardine)
- forza di attrito viscoso: si manifesta quando un oggetto solido si muove all'interno di un fluido (= materia allo stato liquido oppure allo stato gassoso); questa forza di attrito dipende dal tipo di fluido considerato e dalla velocità con la quale l'oggetto solido si muove (esempi: la barca che naviga in acqua; la porta che ruota sul suo cardine)
Le formule per calcolare i valori di queste forze sono diverse rispetto a quelle studiate per l'attrito radente; tuttavia, anche queste forze agiscono nella direzione parallela al piano di appoggio e in verso opposto a quello del moto.
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
