Posizionamento satellitare GNSS: metodi di impiego e misure di distanza
Slide da IIS E. Guala – Cat - Topografia su Posizionamento Satellitare GNSS. Il Pdf, utile per la scuola superiore in Tecnologia, descrive la classificazione dei metodi di impiego del sistema GPS, le misure di codice e di fase per la distanza ricevitore-satellite e i tempi di elaborazione dei dati.
Mostra di più19 pagine


Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
Posizionamento satellitare GNSS
IIS E. Guala - CAT - Topografia
Posizionamento satellitare GNSS
parteIl GPS è un sistema molto flessibile che consente svariate modalità di
utilizzo in funzione di impieghi, precisioni, tempi e costi.
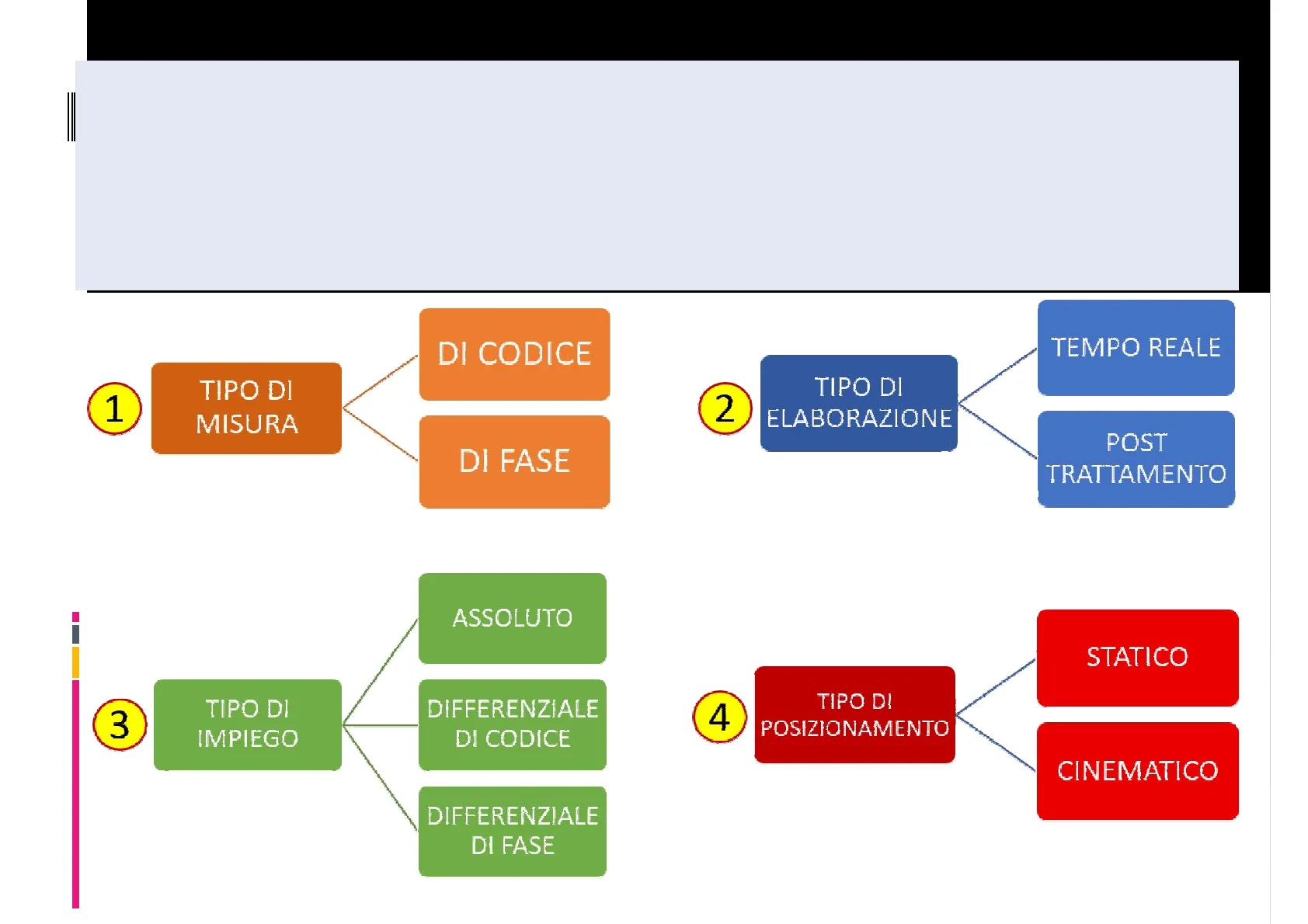
In generale le fondamentali modalità di impiego del GPS sono
caratterizzate da diversi fattori che possono essere classificati secondo i
seguenti criteri.
DI CODICE
TEMPO REALE
1
TIPO DI
MISURA
2
TIPO DI
ELABORAZIONE
DI FASE
POST
TRATTAMENTO
ASSOLUTO
STATICO
3
TIPO DI
IMPIEGO
DIFFERENZIALE
DI CODICE
DIFFERENZIALE
DI FASE
4
TIPO DI
POSIZIONAMENTO
CINEMATICO
Tipi di misura della distanza ricevitore-satellite
Misura di codice (code pseudo-range)
2TIPO DI MISURA DELLA DISTANZA RICEVITORE-SATELLITE
misura di codice
(code pseudo-range)
- E basata sulla stima della
differenza
di
tempo
ottenuta
valutando
il
codice binario (PRN) emesso
dal satellite e quello generato
nel ricevitore (replica). - Sono
le
misure
più
semplici
e
rapide
da
acquisire
e
da
elaborare
(ricevitori
più
economici,
perlopiù eseguite in tempo
reale dal ricevitore stesso),
ma sono affette da errori
dovuti
alla
valutazione
dell'intervallo di tempo.
S
0110110100101101011011010010110
PSEUDO-RANGE
A
errori di
valutazione
del tempo
R
GPSmap
...
GARMIN
Misura di fase (phase true-range)
3TIPO DI MISURA DELLA DISTANZA RICEVITORE-SATELLITE
misura di fase
(phase true-range)
- E
basata
sul
calcolo
della
differenza di fase tra la portante
demodulata (preferibilmente la L1)
emessa dal satellite, e la replica
della
stessa
portante
generata
all'interno del ricevitore. - Ciò consente di stabilire il numero
di lunghezze d'onda (parti intere e
parte
frazionale)
presenti
fra
il
satellite e il ricevitore, ottenendo la
relativa
distanza
(approssimata
a
1/100 della lunghezza d'onda). - Sono le più complesse da acquisire
e da elaborare (ricevitori più costosi e
software dedicato), tuttavia sono le
più accurate e affidabili.
S
V
TRUE-RANGE
R
Tempi di elaborazione
Post-elaborazione (post-processing)
4TEMPI DI ELABORAZIONE
in post-elaborazione (post-processing)
il risultato della elaborazione delle misure è disponibile in tempi
differiti, successivi alle operazioni effettuate in campagna, durante le
quali vengono acquisiti e elaborati i dati trasmessi dai satelliti in un
opportuno intervallo di tempo, Il vantaggio, rispetto all'elaborazione
in tempo reale, è la possibilità di affinare il modello delle cause degli
errori sistematici delle misure (più spesso misure di fase), ottenendo
le massime precisioni.
Tempo reale (real-time)
in tempo reale (real-time)
la posizione dei ricevitori (in un certo istante) è direttamente e
immediatamente disponibile in sito durante le operazioni di
campagna. Essa, in origine era ottenuta solo con misure di codice
(pseudo-range), quindi con una precisione della misura non molto
elevata (posizionamento assoluto in ambito navigazione). Tuttavia,
ben presto, l'evoluzione tecnologica del sistema ha permesso di
ottenere la posizione in tempo reale anche con misure di fase
(tecnica RTK) dunque con maggior affidabilità.
Tecniche di impiego dei ricevitori
Posizionamento assoluto
5TECNICHE DI IMPIEGO DEI RICEVITORI
Posizionamento assoluto
- Viene utilizzato
un solo ricevitore
col quale devono essere agganciati
almeno 4 satelliti. - Il sistema fornisce le coordinate
cartesiane assolute (X, Y, Z) del
centro dell'antenna del ricevitore nel
sistema di riferimento geocentrico
WGS84,
talvolta
trasformate
in
coordinate
geografiche
(latitudine,
longitudine e quota ellissoidica: o, 2,
h). - Il
metodo
non
presenta
precisioni
adeguate
ad
appli-
cazioni topografiche, pertanto viene
utilizzato perlopiù nella navigazione
Orbite satelliti
Calcolo in tempo reale
delle coordinate X, Y, Z
dalle quali anche q, 2, h
Posizionamento differenziale (DGPS) di codice
6TECNICHE DI IMPIEGO DEI RICEVITORI
Posizionamento differenziale
(DGPS) di CODICE
Vengono
utilizzati
almeno
due
ricevitori
dai
quali
devono
essere
agganciati
simultaneamente
almeno
4
satelliti, e che presentano le
seguenti caratteristiche :
un
ricevitore
fisso
collocato
su un
punto
di
coordinate note (ricevitore
base),
che
registra
con
continuità il segnale GPS.
un
secondo
ricevitore
fisso
ricevitore remoto)
0
itinerante (ricevitore rover).
Orbite satelliti
R
Ricevitore
Base (Master)
di posizione
nota: XR, YR, ZR
baseline
Ricevitore Remoto
(Rover)
Con calcolo in post-elabora-
zione delle coordinate X, Y, Z
quindi anche q, 2, h
Osservazioni sul posizionamento differenziale
7TECNICHE DI IMPIEGO DEI RICEVITORI
Osservazioni sul posizionamento differenziale
Con
la
tecnica
differenziale,
si
possono
rimuovere gli errori
sistematici (detti bias) dalle misure effettuate dai due ricevitori.
- Si basa sulle correzioni da apportare, in tempo reale o differito, alle
misure di codice del ricevitore remoto, determinate dal ricevitore
base che deve essere su un punto di posizione nota.
Nel posizionamento differenziale le sessioni di
misura non vengono effettuate per punti isolati,
ma per coppie di punti ottenendo la posizione
relativa del ricevitore rover, rispetto
al
ricevitore base (di coordinate note XR, YRy
ZR), attraverso le componenti AX, AY, AZ del
vettore tridimensionale detto
`baseline'
che
unisce i centri delle antenne dei due ricevitori.
In effetti sommando queste componenti alle
coordinate della stazione base, si ricavano le
coordinate assolute (X, Y, Z)
anche del
secondo punto (stazione remota).
Z
baseline
I
AZ
P2
P1
Y
O
1
ΔΥ
AX
X
Posizionamento differenziale di fase
8TECNICHE DI IMPIEGO DEI RICEVITORI
Posizionamento differenziale di FASE
La tecnica ha le stesse caratteristiche del
posizionamento
differenziale
di
codice
(rimozione degli errori sistematici comuni
ai
due
ricevitori
determinandone
la
posizione relativa) ma è basato sulle
misure di fase (true-range).
- Le misure vengono poi trattate, come
detto,
considerando
le
combinazioni
lineari (differenze singole, doppie, triple)
delle equazioni di misura effettuate tra i
ricevitori
e i
satelliti
simultaneamente
agganciati con l'applicazione di algoritmi che
permettono di eliminare dalle equazioni di
misura gli errori sistematici dipendenti dai
satelliti o dal ricevitore, fornendo precisioni
al centimetro.
Ricevitore
rover
Ricevitore
base
TOPCON
Posizionamento differenziale RTK (Real Time Kinematic)
9TECNICHE DI IMPIEGO DEI RICEVITORI
Posizionamento differenziale RTK ( Real Time Kinematic)
Quando le correzioni vengono apportate in tempo reale, con il ricevitore remoto
in movimento (ricevitore rover), il metodo viene indicato con la sigla RTK.
- Tuttavia, in questo caso, è necessario che le correzioni da apportare al ricevitore
rover vengano trasmesse dal ricevitore base, durante le operazioni di campagna,
attraverso un collegamento radio UHF, o per telefonia cellulare (GSM).
orbite dei satelliti
A
invio delle correzioni
al ricevitore rover
ricevitore
base (master)
di posizione
nota: XR, YR, ZR
antenna
radio
ricevitore
remoto
(rover)
calcolo delle coordinate X, Y, Z
in tempo reale, quindi
anche di q, , h
Tecniche di rilievo
Tecniche statiche
10TECNICHE DI RILIEVO
statiche
- i ricevitori permangono fermi (e accesi) sui punti per un certo tempo
(in generale tra 5' e 60') durante il quale registrano i segnali emessi dai
satelliti.
Tecniche cinematiche
cinematiche
uno (o più) dei ricevitori (rover) è in continuo movimento itinerante.
Schema riepilogativo degli errori
ERRORI
ASSOLUTO
3 - 15m
TEMPO REALE
DGPS
DIFFERENZIALE
0,3 - 1,5m
CODICE
SCHEMA
ASSOLUTO
1,5 - 5m
POST-
TRATTAMENTO
DIFFERENZIALE
0,2 - 1m
GPS
ASSOLUTO
NON
IMPIEGATO
TEMPO REALE
RTK
DIFFERENZIALE
1 - 10cm
FASE
ASSOLUTO
NON
IMPIEGATO
POST-
TRATTAMENTO
DIFFERENZIALE
1 - 50mm
RIEPILOGATIVO
La misura di fase (true range)
11LA MISURA DI FASE
(true range)
12LA MISURA di FASE
Con questa tecnica, all'interno del ricevitore si misura la differenza di fase Ao
tra l'onda portante ricevuta dal satellite, e un'onda di uguale frequenza generata
nel ricevitore. Da essa si ottiene
la frazione di lunghezza d'onda
42=(4/27).2, che è parte della distanza ricevitore-satellite.
La misura di fase consente
maggiori precisioni
ma in un contesto che, che si
basa sui seguenti punti:
- le misure di fase sono impiegate nel posizionamento differenziale;
- le misure di fase vengono utilizzate con complesse combinazioni di misura,
da più ricevitori a più satelliti, per eliminare gli errori del sistema
Portante modulata ricevuta dal satellite
Codice
1
1
1 0 0 0 1 1 0 00
Portante demodulata nel ricevitore
Portante riprodotta nel ricevitore (replica)
1
Posizionamento differenziale con misure di fase
13POSIZIONAMENTO DIFFERENZIALE con MISURE di FASE
Per effetto della distanza percorsa
dal segnale, l'onda portante emessa
dal satellite arriva nel ricevitore con la
differenza di fase Ao (che viene
misurata),
rispetto
alla
copia
generata localmente nel ricevitore.
- La differenza di fase Lo dipende solo
dalle posizioni relativa tra satellite e
ricevitore. - La misura della distanza ricevitore-
satellite avviene contando il numero
intero N
(ambiguità intera)
di lun-
ghezze d'onda » della portante, più la
frazione
di
lunghezza
d'onda
^2=(40/2T).2 ottenuta, nel ricevitore,
dalla
misura
dello
sfasamento:
d=N.A+ (Δφ/2π).λ
₹
N.2 + 42
TO
41 =
feica
Combinazioni lineari delle equazioni delle misure di fase
14COMBINAZIONI LINEARI
delle EQUAZIONI delle MISURE DI FASE
- La precisione ottenibile con il posizionamento differenziale è
maggiore di quella che si ottiene con il posizionamento assoluto, non
solo perché vengono impiegate misure di fase invece che misure di
codice, ma anche perché esso consente di rimuovere (o limitare in
modo significativo) alcuni errori sistematici. - Riassumendo, il posizionamento differenziale di fase si basa
essenzialmente sui seguenti fattori:
misure di fase da almeno due ricevitori
costruzione di combinazioni lineari delle misure tra i ricevitori e i
satelliti per eliminare gli errori sistematici secondo una tecnica detta
delle differenze multiple (singole, doppie, triple)
impiego di appositi software che permettono di trattare le misure
per ottenere le incognite ricercate sia in post trattamento, ma anche in
tempo reale (RTK).
Aspetti altimetrici del GPS
15ASPETTI ALTIMETRICI
DEL GPS
Il sistema WGS84
16IL SISTEMA WGS84
Le informazioni ottenute dai satelliti GPS
permettono di definire la posizione dei
punti su cui sono collocati di ricevitori
sotto forma di:
- Coordinate geocentriche (X, Y, Z)
- coordinate geografiche (pe , Ne,h)
Notiamo
subito
che la coordinata
geocentrica Z, non è legata al concet-to
di "distanza dalla superficie di rife-
rimento" indispensabile nel contesto
tecnico-operativo, nel quale pertanto,
vengono
preferite
le
coordinate
geografiche (De , Nerh).
E poi possibile, utilizzando apposite
procedure di calcolo (Verto-IGM), la
trasformazione delle coordinate geo-
grafiche elissoidiche Qe Ner h, nelle
corrispondenti coordinate cartografiche
N,E,Z del sistema GaussBoaga
Datum
Roma40).
1Z
meridiano
per Po
1
ellissoide
WGS84
Pi
G
h
Piano equatoriale
Pod
1
ZP
Y
O
Xp
2!i
X
Y !
P
17
meridiano
origine
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
