Caracterización de los elementos mecánicos: máquinas y mecanismos
Documento sobre Caracterización de los elementos mecánicos. El Pdf, de Bachillerato y Tecnología, describe la clasificación de máquinas, incluyendo simples y compuestas, y detalla los tipos de palancas, mecanismos y operadores.
Ver más29 páginas

Visualiza gratis el PDF completo
Regístrate para acceder al documento completo y transformarlo con la IA.
Vista previa
Introducción a los Elementos Mecánicos
El ser humano necesita realizar tareas que sobrepasan su capacidad física o intelectual: mover rocas enormes, elevar coches para repararlos, transportar objetos o personas a grandes distancias, cortar árboles, resolver gran número de operaciones matemáticas en poco tiempo, etc. Para solucionar este problema se inventaron las máquinas. La función de las máquinas es reducir el esfuerzo necesario para realizar un trabajo. Ejemplos de máquinas son la grúa, la excavadora, los ordenadores, los robots, etc. Todos ellos tienen una finalidad común, reducir el esfuerzo necesario para realizar un trabajo.
Tipos de Máquinas
Las máquinas inventadas por el hombre se pueden clasificar atendiendo a tres puntos de vista:
- Según su complejidad, que se verá afectada por el número de operadores (piezas) que la componen. Analizando nuestro entorno podemos encontrarnos con máquinas sencillas (como las pinzas de depilar, el balancín de un parque, un cuchillo, un cortaúñas o un motor de gomas), complejas (como el motor de un automóvil o una excavadora) o muy complejas (como un cohete espacial o un motor de reacción), todo ello dependiendo del número de piezas empleadas en su construcción.
- Según el número de pasos o encadenamientos que necesitan para realizar su trabajo. También nos podemos fijar en que el funcionamiento de algunas de ellas nos resulta muy fácil de explicar, mientras que el de otras solo está al alcance de expertos. La diferencia está en que algunas máquinas solamente emplean un paso para realizar su trabajo (máquinas simples), mientras que otras necesitan realizar varios trabajos encadenados para poder funcionar correctamente (máquinas compuestas). La mayoría de nosotros podemos describir el funcionamiento de una escalera (solo sirve para subir o bajar por ella) o de un cortaúñas (realiza su trabajo en dos pasos: una palanca le transmite la fuerza a otra que es la encargada de apretar los extremos en forma de cuña); pero nos resulta imposible explicar el funcionamiento de un ordenador, un motor de automóvil o un satélite espacial.
Según el número de tecnologías que la integran. Por ultimo, podemos ver que algunas de ellas son esencialmente mecánicas (como la bicicleta) o electrónicas (como el ordenador); pero la mayoría tienen mezcladas muchas tecnologías o tipos de energías (una excavadora dispone de elementos que pertenecen a las tecnologías eléctrica, mecánica, electrónica, hidráulica, neumática, térmica, química ... todo para facilitar la extracción de tierras).
Máquinas Simples
Cuando la máquina es sencilla y realiza su trabajo en un solo paso nos encontramos ante una máquina simple. Muchas de estas máquinas son conocidas desde la prehistoria o la antigüedad y han ido evolucionando incansablemente (en cuanto a forma y materiales) hasta nuestros días. Algunas inventos que cumplen las condiciones anteriores son: cuchillo, pinzas, rampa, cuña, polea simple, rodillo, rueda, manivela, torno, hacha, pata de cabra, balancín, tijeras, alicates, llave fija .. Las máquinas simples se pueden clasificar en tres grandes grupos que se corresponden con el principal operador del que derivan: palanca, plano inclinado y rueda.
La Palanca
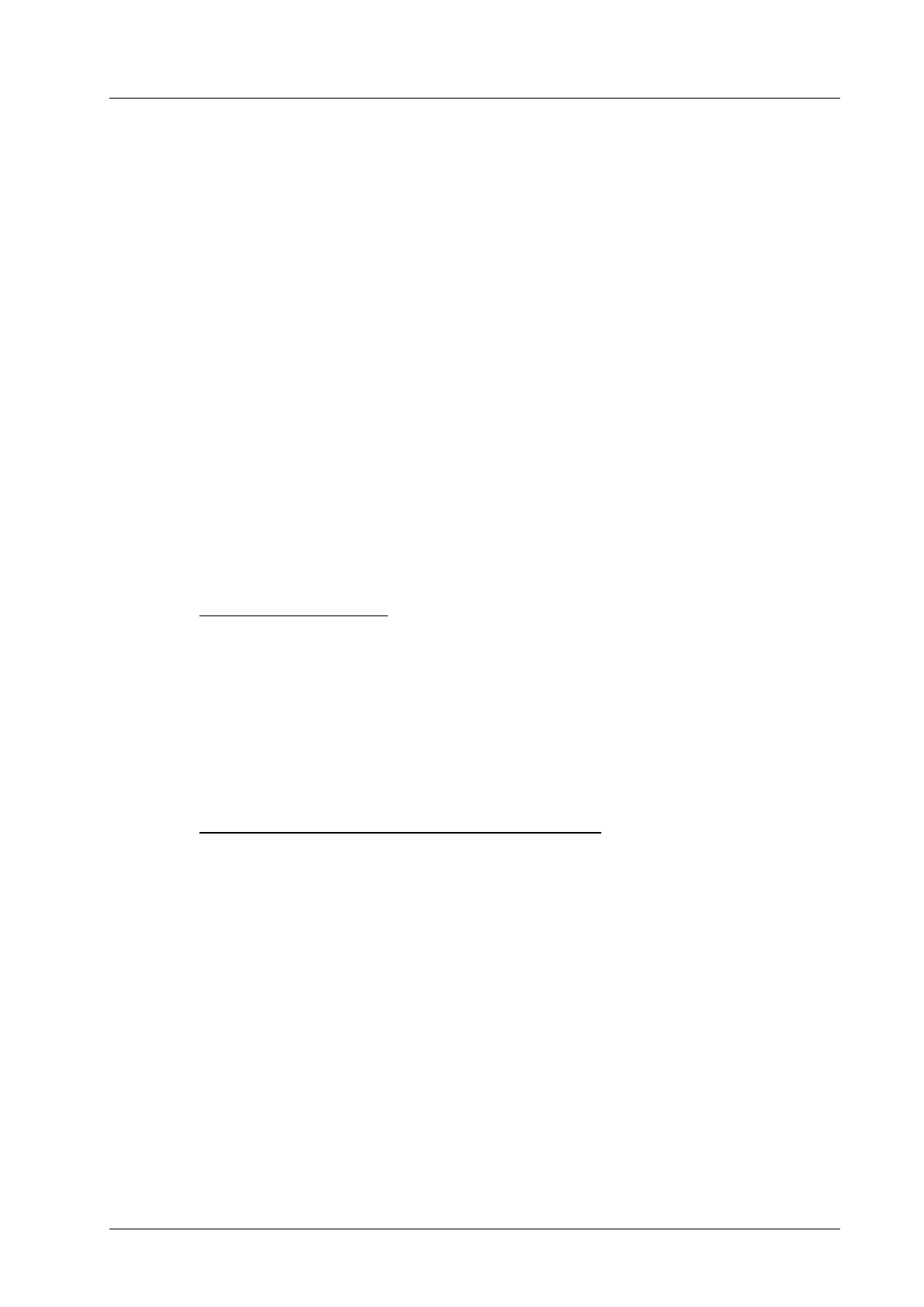
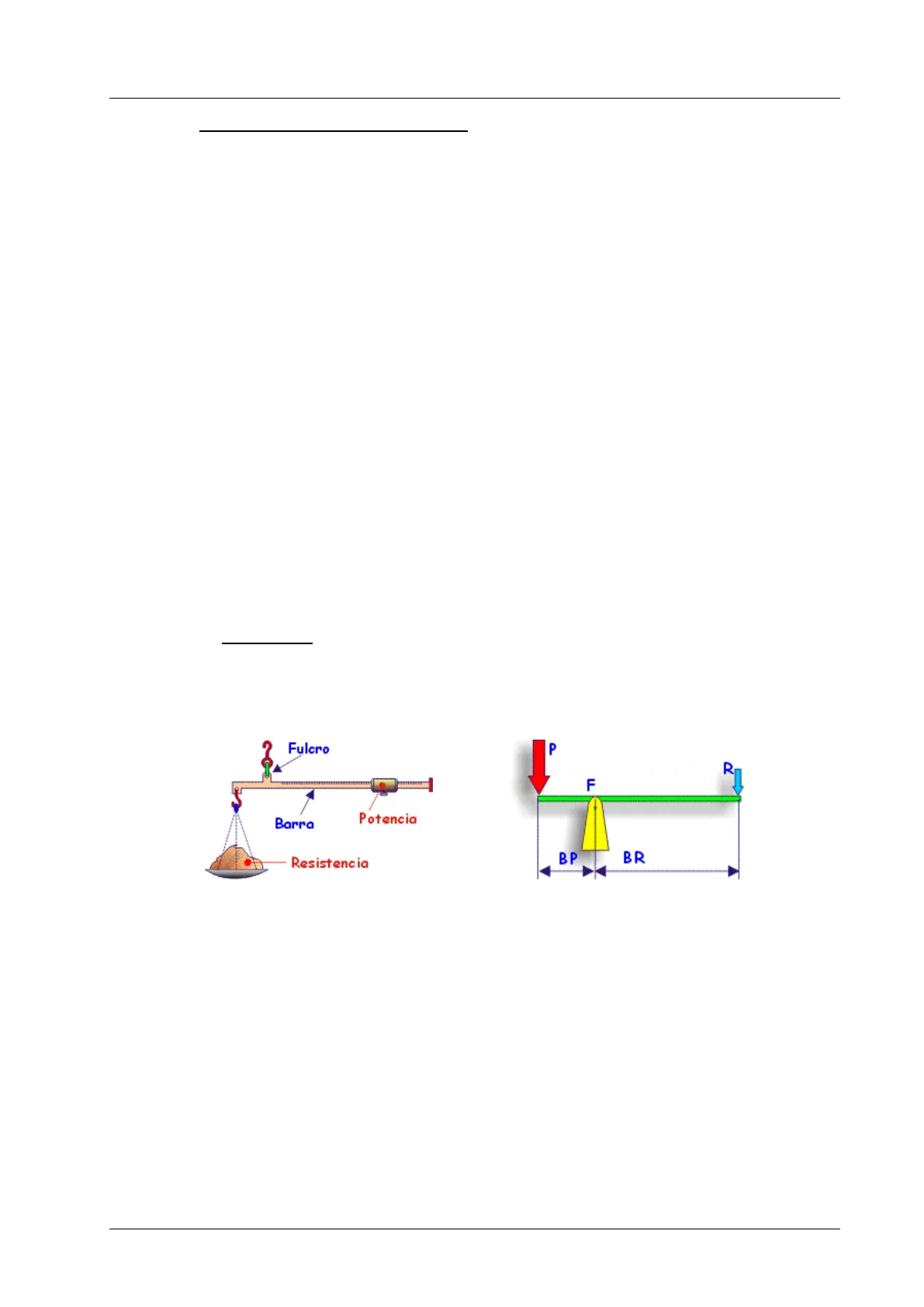
La palanca es una máquina (u operador) formada por una barra rígida que oscila sobre un punto de apoyo (fulcro) debido a la acción de dos fuerzas contrapuestas (potencia y resistencia). Fulcro Potencia Barra Resistencia P R BP BR
- Potencia (P), fuerza que tenemos que aplicar.
- Resistencia (R), fuerza que tenemos que vencer; es la que hace la palanca como consecuencia de haber aplicado nosotros la potencia.
- Brazo de potencia (BP), distancia entre el punto en el que aplicamos la potencia y el punto de apoyo (fulcro).
- Brazo de resistencia (BR), distancia entre el punto en el que aplicamos la resistencia y el (fulcro).
Según los puntos en los que se aplique la potencia (fuerza que provoca el movimiento) y las posiciones relativas de eje y barra, se pueden conseguir tres tipos diferentes de palancas a los que se denomina: de primero (fulcro entre la potencia y la resistencia), segundo (resistencia entre la potencia y el fulcro) y tercer género o grado (potencia entre el fulcro y la resistencia). Potencia Potencia Resistencia Barra P Resistencia F R O t P Eje o fulcro (punto de apoyo) El esqueleto humano está formado por un conjunto de palancas cuyo punto de apoyo (fulcro) se encuentra en las articulaciones y la potencia en el punto de unión de los tendones con los huesos; es por tanto un operador presente en la naturaleza. De este operador derivan multitud de máquinas muy empleadas por el ser humano: cascanueces, alicates, tijeras, pata de cabra, carretilla, remo, pinzas ...
El Plano Inclinado
El plano inclinado es un operador formado por una superficie plana que forma un ángulo oblicuo con la horizontal. Las rampas que forman montañas y colinas son planos inclinados, también pueden considerarse derivados de ellas los dientes y las rocas afiladas, por tanto este operador también se encuentra presente en la naturaleza. De este operador derivan máquinas de gran utilidad práctica como: broca, cuña, hacha, sierra, cuchillo, rampa, escalera, tornillo-tuerca, tirafondos ... orificio roscado Plano inclinado (rampa) ángulo agudo ángulo agudo avance giro husillo Presilla
La Rueda
La rueda es un operador formado por un cuerpo redondo que gira respecto de un punto fijo denominado eje de giro. Normalmente la rueda siempre tiene que ir acompañada de un eje cilíndrico (que guía su movimiento giratorio) y de un soporte (que mantiene al eje en su posición). Rueda Soporte (armadura) Rueda dentada Rueda de palas Eje Rueda Rueda de transporte Polea Aunque en la naturaleza también existen cuerpos redondeados (troncos de árbol, cantos rodados, huevos ... ), ninguno de ellos cumple la función de la rueda en las máquinas, por tanto se puede considerar que esta es una máquina totalmente artificial. De la rueda se derivan multitud de máquinas de las que cabe destacar: polea simple, rodillo, tren de rodadura, noria, polea móvil, polipasto, rodamiento, engranajes, sistema correa-polea ... Las ruedas se emplean en multitud de aplicaciones, algunas muy usuales son: Facilitar el desplazamiento de objetos reduciendo el rozamiento entre superficies (tren de rodadura, rodillo, rodamiento); como en carretillas, coches, bicicletas, patinetes, pasillos rodantes ... rueda soporte (armadura) eje movimiento giratorio radio eje pala soporte- movimiento lineal Rueda de paletas Obtener un movimiento rotativo en un eje a partir del movimiento del agua (rueda de palas, noria, turbina o rodete); como en contadores de agua, molinos de agua, norias de regadío, centrales hidroeléctricas, turbinas ... Transmitir £ un movimiento giratorio entre ejes (polea, piñón, ruedas de fricción ... ); como en lavadoras, neveras, bicicletas, motos, motores de automóvil, taladros, tocadiscos ... polea del bombo bombo correa- motor- polea del motor Transmisión de movimiento en una lavadora Polea fija Cuerda Reducir el esfuerzo necesario para elevar una masa (polea de cable, polea móvil, polipasto ... ); como en pozos de agua, grúas, ascensores ... Transformar en giratorio otros movimientos o viceversa (excéntrica, leva, torno); como en piedras de afilar, máquinas de coser, ruedas de timón, programadores de lavadora, cabrestantes ... Excéntrica Biela Palanca
Máquinas Compuestas
Cuando no es posible resolver un problema técnico en una sola etapa hay que recurrir al empleo de una máquina compuesta, que no es otra cosa que una sabia combinación de diversas máquinas simples, de forma que la salida de cada una de ellas se aplica directamente a la entrada de la siguiente hasta conseguir cubrir todas las fases necesarias. Las máquinas simples, por su parte, se agrupan dando lugar a los mecanismos, cada uno encargado de hacer un trabajo determinado. Si analizamos un taladro de sobremesa podremos ver que es una máquina compuesta formada por varios mecanismos: uno se encarga de crear un movimiento giratorio, otro de llevar ese movimiento del eje del motor al del taladro, otro de mover el eje del taladro en dirección longitudinal, otro de sujetar la broca, otro ... Aguja Prensa telas Lanzadera Bobina C2002 HowStuffWorks La práctica totalidad de las máquinas empleadas en la actualidad son compuestas, y ejemplos de ellas pueden ser: polipasto, motor de explosión interna (diesel o gasolina), impresora de ordenador, bicicleta, cerradura, lavadora, video ...
Elementos y Mecanismos
La función de las máquinas es reducir el esfuerzo necesario para realizar un trabajo. En general, toda máquina está formada por 3 elementos principales:
- Elemento motriz: dispositivo que introduce la fuerza o el movimiento en la máquina. Suele tratarse de un motor (de gasolina o eléctrico), de esfuerzo muscular (de una persona o un animal), una fuerza natural (viento, agua), ...
- Mecanismo: dispositivo que traslada el movimiento del elemento motriz al elemento receptor.
- Elemento receptor: recibe el movimiento o la fuerza para realizar la función de la máquina (un ejemplo son las ruedas).
Toda máquina compuesta es una combinación de mecanismos; y un mecanismo es una combinación de operadores cuya función es producir, transformar o controlar un movimiento. Los mecanismos se construyen encadenando varios operadores mecánicos entre sí, de tal forma que la salida de uno se convierte en la entrada del siguiente. Para diseñar mecanismos necesitamos conocer el movimiento que tenemos (movimiento de entrada) y el que queremos (movimiento de salida) para después elegir la combinación de operadores (mecanismo) más adecuada. En el cuadro siguiente se ofrece una clasificación.
Clasificación de Mecanismos
| Movimiento Entrada | Movimiento Salida | Mecanismo que podemos emplear |
| Giratorio | Giratorio | Ruedas de fricción Transmisión por correa (Polea-correa) Transmisión por cadena (Cadena-piñón) Rueda dentada-Linterna Engranajes Sinfín-piñón |
| Giratorio | Lineal alternativo | Leva-palanca Excéntrica-biela-palanca Cigüeñal-biela Excéntrica-biela-émbolo (biela-manivela) Leva-émbolo |
| Giratorio | Lineal continuo | Cremallera-piñón Tornillo-tuerca Torno-cuerda |
| Lineal alternativo | Oscilante | Excéntrica-biela-palanca Sistema de palancas |
| Lineal continuo | Giratorio | Rueda Torno |
| Oscilante | Giratorio alternativo | Cremallera-piñón |
| Lineal alternativo | Giratorio continuo | Biela-manivela (excéntrica-biela; cigüeñal-biela) |
| Oscilante | Lineal alternativo | Sistema de palancas |
| Giratorio | Oscilante | Cremallera-Piñón o Cadena-Piñón Aparejos de poleas |
Además de lo anterior, se necesita hacer uso de otros mecanismos que no se dedican a transformar movimientos, sino más bien a controlarlos o facilitarlos.
¿Non has encontrado lo que buscabas?
Explora otros temas en la Algor library o crea directamente tus materiales con la IA.
