Calcolo Differenziale: derivate, teoremi e studio di funzione per l'Università
Documento dall'Università sul Calcolo Differenziale. Il Pdf, un set di appunti di Matematica per l'Università, esplora la definizione di derivata, i teoremi classici, le derivate successive e lo studio del grafico di una funzione, includendo il metodo di Newton.
Mostra di più34 pagine


Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
CALCOLO DIFFERENZIALE
ANTONIO IANNIZZOTTO SOMMARIO. Definizione di derivata. Classificazione delle singolarità. Calcolo differenziale elementare. Teoremi di Fermat, Rolle, Cauchy, Lagrange, de l'Hôpital. Derivata prima e monotonia. Derivata seconda. Convessità e flessi. Derivate successive. Classificazione dei punti critici. Formule di Taylor, Maclaurin. Grafico di una funzione. Metodo di Newton. Queste note sono un mero supporto didattico, senza alcuna pretesa di completezza, originalità o precisione.
INDICE
- Il concetto di derivata 1
- Calcolo differenziale elementare 6
- I teoremi classici 10
- Derivate successive 16
- Studio del grafico di una funzione 22
- Approssimazione mediante polinomi 27
- Il metodo di Newton 32
Riferimenti bibliografici 34 Versione del 15 dicembre 2023 Time may change me, but I can't trace time. D. BOWIE
IL CONCETTO DI DERIVATA
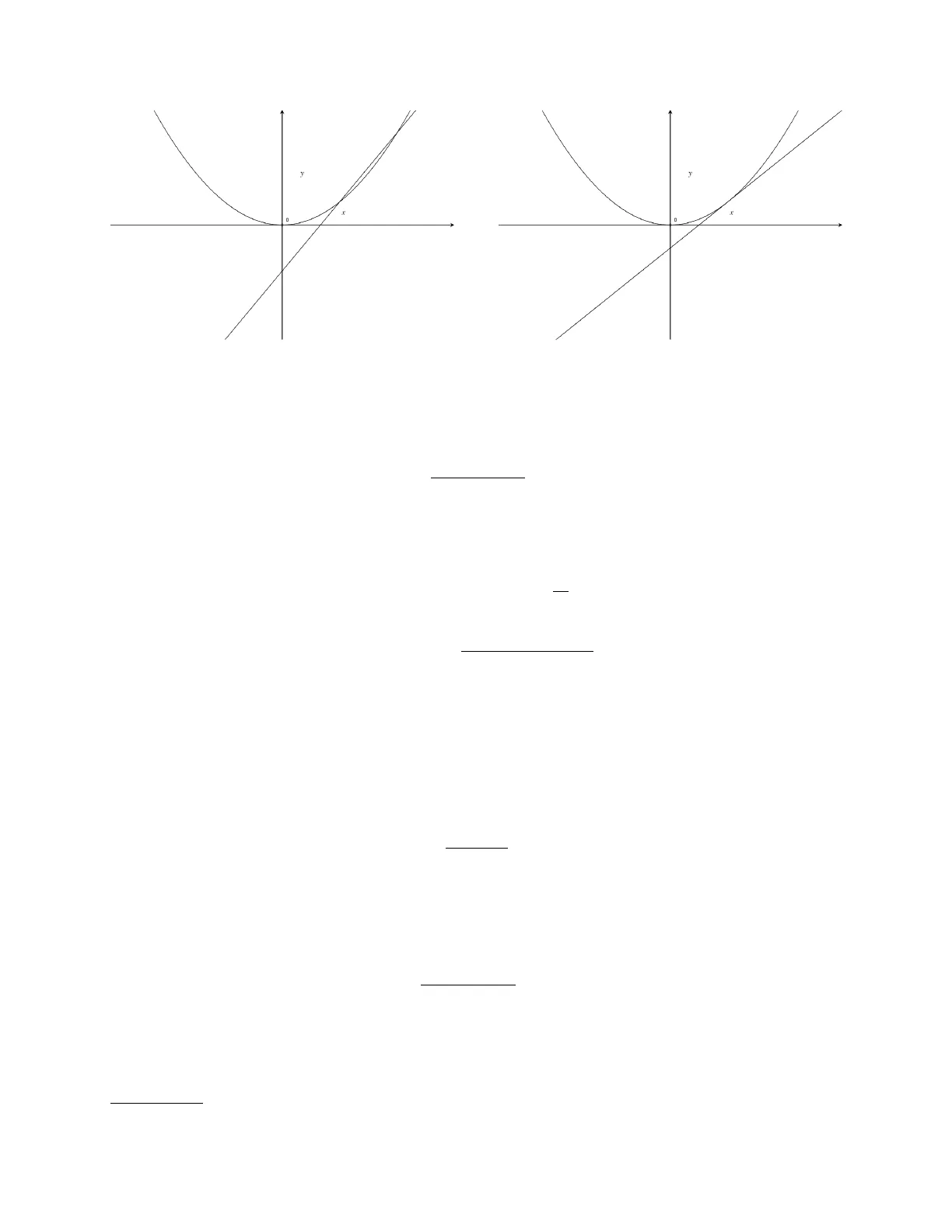
Uno dei motivi per cui si introduce la nozione di derivata di una funzione è la determinazione della retta tangente a una curva in un un punto assegnato. Consideriamo per esempio la parabola di equazione y = x2 e un suo punto Po = (x0,x2) (x0 € R). Dato un altro punto P1 = (x1,x2) (x1 # x0), la retta che li congiunge ha equazione
2 x- x0 0 = 2 - 2020 , ovvero (semplificando) y= (x1+ x0)(x-x0) +x2, m(x1) dove il coefficiente angolare m(x1) è pari al rapporto incrementale della funzione x +> x2 fra i punti xo e x1. Quando x1 -> x0, si ha lim m(x1) = 2x0. x1->x0 Questo numero, detto derivata prima della funzione x + x2 nel punto xo, è il coefficiente angolare della retta tangente alla parabola in P0, che ha equazione completa y = 2x0(x - x0) + x2 (fig. 1, 2). Formalmente:
A. IANNIZZOTTO
y x O FIGURA 1. La parabola y = x2 e una retta secante in (1,1).
y x FIGURA 2. La parabola y = x2 e la retta tangente in (1,1).
Definizione 1.1. Siano I CR un intervallo1, f : I -> R, xo E I. Se esiste l E R t.c. f(x) - f(x0) lim x- x0 =1, la funzione f è detta derivabile in xo e il numero Df (xo) = l è detto derivata di f in xo. Inoltre, f è detta derivabile in I se è derivabile in ogni punto di I, e in tal caso è definita la funzione derivata Df : I ->R. Notazioni equivalenti per la derivata di f in xo sono f'(x0), (xo), f(xo). Ovviamente, se esiste, la derivata si può esprimere anche come Df(x0) = lim h->0 f(x0 +h) - f(x0) h (1.1) . Osservazione 1.2. (Significato geometrico della derivata) Riprendiamo più in generale il ragio- namento svolto per la parabola. Sia f : I -> R derivabile in xo E I. L'equazione di una retta R passante per Po (e non parallela all'asse y) è y = m(x- x0) +f(xo), dove il coefficiente angolare m E R è arbitrario. Diremo che R è tangente a gr(f) in Po se, detto (x, y) un punto di R, si ha lim f(x) -y=0. x- x0 L'unica scelta di m che realizza questa condizione è m = Df(x0), dunque la retta di equazione y= Df(x0)(x-x0) +f(x0) è tangente a gr(f) in Po. Se invece f(x) - f(x0) lim x-+x0 x- x0 = 100 (in particolare f non è derivabile in xo), la tangente a gr(f) in Po è la retta di equazione x = x0. Osservazione 1.3. (Significato fisico della derivata) Consideriamo un corpo che si muove durante un intervallo temporale [0, T] secondo la legge oraria s : [0,T] -> R, dove s(t) denota la distanza 1Svolgeremo tutta la teoria per funzioni definite su un intervallo, per semplicità.3
CALCOLO DIFFERENZIALE
percorsa all'istante t € [0, T]. Fissati due istanti to < t1, la velocità media del moto nell'intervallo [to, t1] è s(t1) - s(to) t1 -to . Se s è derivabile in to, la velocità istantanea è data da Ds(to) = lim t1->to t1 - to In generale, possiamo dire che la derivata di una funzione f in un punto xo è un'altra funzione che descrive la variazione di f vicino a x0 ma senza coinvolgere direttamente altri punti diversi da xo stesso (se x rappresenta il tempo, lo scopo della derivata è condensare la variazione di f (x) in un'informazione istantanea). In accordo con l'Osservazione 1.2 si introduce la seguente definizione: Definizione 1.4. Una funzione f : I -> R è detta differenziabile in xo E R se esiste una funzione lineare df (xo) : R -> R t.c. f(x)- f(x0)-df(xo)(x-x0) lim x->x0 x- x0 =0. In questo caso, la funzione df(xo) è detta differenziale (primo) di f in xo. Una caratterizzazione della differenziabilità, scritta adoperando i simboli di Landau (ved. [2]), è la seguente condizione: f(x0 + h) = f(x0) + Df(x0)h + o(h). (1.2) La Definizione 1.4 in effetti non introduce nulla di nuovo rispetto alla Definizione 1.1: infatti le funzioni lineari definite in R sono in corrispondenza biunivoca con le costanti reali, e si dimostra immediatamente che f è differenziabile in xo => f è derivabile in xo, e che df (x0)(h) = Df(xo)h (i concetti di derivabilità e differenziabilità si distinguono nel contesto delle funzioni di più variabili reali, ved. [6]). Calcoliamo adesso le derivate di alcune funzioni elementari (usando anche i limiti notevoli visti in [2]): Esempio 1.5. Generalizziamo il caso visto all'inizio alla funzione x H x2 (n E N). Ovviamente, per n = 0 abbiamo D(1) = 0. Per ogni n € No ricordiamo il prodotto notevole an - bn = (a - b) (an-1 + an-2b+ ... + b2-1). Si ha allora per ogni x0 € R lim xn - acht = lim (x2-1 + xn-2x0+ ... + x"-1) = nx2-1. Esempio 1.6. Consideriamo la funzione x H xº (a E R \ {0}). Per ogni x0 € [0, +00[ si ha lim h->0 (x0 +h)a - x8 h x8-1 lim h->0 h/x0 = (1 + h/x0)ª -1 = ax8-1. Esempio 1.7. Calcoliamo la derivata della funzione esponenziale x + e". Per ogni xo E R si ha et - et0 e™-10 - 1 lim xxx0 x-x0 = e lim x->x0 x- x0 = et0. s(t1) - s(to) .4
A. IANNIZZOTTO
y x FIGURA 3. y = |x|.
Esempio 1.8. Calcoliamo la derivata della funzione logaritmica x +> In(x). Per ogni xo > 0 si ha x0 +h) x0 h/x0 1 lim In(x0 +h) -In(x0) 1 x0 h->0 = lim - In 1 h->0 h x0 = lim ln(1 + h/x0) = . h->0 h Esempio 1.9. Calcoliamo la derivata della funzione trigonometrica x + sin(x). Ricordiamo la formula di prostaferesi sin(a) - sin(3) = 2 sin (1.3) (a-B) cos ( a+ B ) . Fissato x0 E R, per ogni x # x0 si ha sin(x) - sin(x0) x- x0 sin ( - 20) 2 2 x- x0 cos ( (x + x0) -> cos(x0), 2 = così che D sin(x) = cos(x). Similmente si calcolano le seguenti derivate: Da" = a™ In(a) (a > 0), Dlna(x) = x ln(a) 1 (a>0,a+1), Dcos(x) =- sin(x). Teorema 1.10. Sia f : I -> R derivabile in xo E I. Allora f è continua in xo. Dimostrazione. Chiaramente x0 € DI. Si ha per ogni x € I, x # x0 f(x) = x- x0 f(x) - f(x0) (x- x0) + f(x0) -> f(xo), cioè f è continua in xo. L'implicazione non si inverte: Esempio 1.11. La funzione x -> |x| è continua, ma non derivabile in 0 (fig. 3). Infatti si ha lim h->0+ |h| - |0| h 1, h->0- lim h = -1. Per studiare le funzioni come quella dell'Esempio 1.11, introduciamo le derivate unilaterali: Definizione 1.12. Siano f : I -> R, x0 € I \ {sup I}. Se esiste l E R t.c. f(x) - f(x0) lim .+ x -xo = l, 0 allora f è derivabile da destra in xo e la derivata destra è D+ f(xo) =l.5
CALCOLO DIFFERENZIALE
x FIGURA 4. y = |x|.
y x 0 FIGURA 5. y = 3x.
La definizione della derivata sinistra D- f(xo) è analoga. Ovviamente se D+f(x0) =D=f(x0) =1, allora f è derivabile in xo con Df(x0) = l. L'uso delle derivate unilaterali permette di classificare le più comuni singolarità di una funzione. Definizione 1.13. Siano f : I -> R, xo E I t.c. f è continua ma non derivabile in xo. Allora xo è un punto singolare per f. In particolare: (¿) se esistono finite D+f(x0) = l+ con l+ +l-, xo è un angolo per f; (ii) se f(x0+h) - f(x0) lim h->0 h = 100 o se xo è uno degli estremi di I e l'unica derivata calcolabile è Loo, xo è un punto a tangente verticale per f ; (iii) se lim h->0± f(x0+h) - f(x0) h = 100, xo è una cuspide per f . Osserviamo che la differenza fra i casi (ii) e (iii) è che in (ii) i limiti coincidono, mentre in (iii) sono opposti. Chiaramente l'Esempio 1.11 mostra un angolo (¿). I seguenti esempi illustrano vari tipi di punti di non-derivabilità: Esempio 1.14. La funzione f : R -> R, f(x) = In(|x| +1) (fig. 4) non è derivabile in 0 in quanto D+f(0)=1, D=f(0) =- 1, si tratta quindi di un angolo (Definizione 1.13 (¿)). Esempio 1.15. La funzione f : R -> R, f(x) = 3x (fig. 5) non è derivabile in 0 in quanto f(x)-f(0) lim x->0+ x x->0- = lim f(x)-f(0) x = +00, il che fa di 0 un punto a tangente verticale (Definizione 1.13 (ii)). Esempio 1.16. La funzione f : R > R, f(x) = V|| (fig. 6) non è derivabile in 0 in quanto lim f(x)- f(0) x = +00, lim x->0- f(x)-f(0) x = -00, x->0+ il che fa di 0 una cuspide (Definizione 1.13 (iii)).6
A. IANNIZZOTTO
y x 0 FIGURA 6. y = VIxxl.
y FIGURA 7. y = x sin (1).
Non tutte le singolarità rientrano nella Definizione 1.13: Esempio 1.17. La funzione f : R -> R (fig. 7) definita da (2)={ Læsin 0 x se x + 0 se x = 0 è continua ma non derivabile in 0 in quanto non esistono i limiti lim x->0± f(x)-f(0) x x->0= = lim sin 1 x Esercizio 1.18. Calcolare la derivata di x + cos(x) mediante le formule di prostaferesi e quella di xH In(x) mediante limiti notevoli. Esercizio 1.19. Determinare, se esiste, la retta tangente al grafico di f :]0, +[-> R, f(x) = x-In(x) nel punto (1,1). Esercizio 1.20. Sia f : R -> R una funzione pari (f(-x) = f(x)), derivabile nel suo dominio. Dimostrare che Df : R -> R è dispari (Df(-x) = - Df(x)). E se f è dispari? Esercizio 1.21. Descrivere le singolarità delle funzioni x+, V1 - x2, elx-2). Esercizio 1.22. Studiare il comportamento in 0 della funzione f(x) = - π 2 x arctan 1 se x = 0 se x = 0.
CALCOLO DIFFERENZIALE ELEMENTARE
In questa sezione riportiamo alcuni risultati che permettono di calcolare le derivate di varie combinazioni di funzioni elementari. Lemma 2.1. (Operazioni sulle derivate) Siano f, g : I -> R derivabili in xo E I. Allora: (i) D[f +g](x0) = Df(x0)+Dg(x0); (ii) D[fg](x0)= Df(x0)g(x)+f(xo)Dg(xo); Dg(x0) (iii) se g(x0) +0, D O, D[](x) =- g(x0)2' 1 .7
CALCOLO DIFFERENZIALE
(2) +0, D[](z)= g(x0)2 Df(x0)g(x0)- f(x0)Dg(x0) . Dimostrazione. La prova di (¿) è banale. Dimostriamo (ii). Per ogni x € I \ {x0} si ha f(x)g(x) - f(x)g(x0) = f(x)- f(x0) g(x) - g(x0) x- x0 , x- x0 x- x0 g(x)+f(x0) e passando al limite per x -> xo concludiamo. Dimostriamo (iii). Per x € I \ {xo} abbastanza vicino a x0 si ha g(x) = 0 (Teorema di permanenza del segno, ved. [2]), da cui g(x)-1-g(x0)-1 x- x0 = g(x)g(x0) 1 g(x0) - g(x) , e passando al limite per x -> xo concludiamo. Infine, (iv) è una combinazione delle precedenti. Applicando il Lemma 2.1, possiamo derivare diverse combinazioni di funzioni elementari: Esempio 2.2. Consideriamo un polinomio f (x) = anx" + an-1x-+.a1x + ao, di grado n E No e coefficienti ao, ... an E R (an # 0). Si ha allora per il Lemma 2.1 (i) Df(x) = nanx™-1+ (n-1)an-1x2-2 + ... + @1. Per esempio, D[x3 + 4x2 + 2x] = 3x2 + 8x + 2. Esempio 2.3. Sia x ER, x = " + KT (k E Z). Si ha per il Lemma 2.1 (iv) Dtan(x) = D = cos(x)2 + sin(x)2 cos(x)2 = cos(x)2* 1 Similmente, per ogni x E R, x + kT (k € Z) si ha D cot(x) = sin(x)2 1 I seguenti lemmi permettono di derivare anche funzioni composte e inverse: Lemma 2.4. (Derivata di funzione composta) Siano I, J C R intervalli, f : I -> J, g : J -> R, IO E I, yo = f(x0) t.c. f è derivabile in xo e g è derivabile in yo. Allora go f : I -> R è derivabile in x0 e D(gof)(xo)=Dg(yo)Df(xo). Dimostrazione. In particolare f è continua in xo e g in yo. Per semplicità, possiamo assumere che f(x) = f(xo) per ogni x € I \ {x} in un intorno di xo. Dunque abbiamo g(f(x))-g(f(xo)) x- x0 = f(x)-yo g(f(x))-g(yo) f(x) - f(xo) x- x0 , e passando al limite per x -> xo concludiamo. Esempio 2.5. Si ha, per ogni x E R ove le funzioni coinvolte siano definite e derivabili, [v] = 27 DI( 2Vx' D[ln(sin(x))] = cot(x), D[x]= D[ezln(a)] =x™(In(x) +1). Osserviamo che la funzione composta go f può essere derivabile in un punto senza che lo siano f e g.
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
