Funzioni di trasferimento nei sistemi automatici con trasformata di Laplace
Documento sulle funzioni di trasferimento nei sistemi automatici. Il Pdf esplora l'applicazione della trasformata di Laplace ai circuiti elettrici, analizzando segnali di ingresso come impulso, gradino e sinusoide, ed è utile per lo studio universitario di Informatica.
Mostra di più16 pagine

Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
Funzioni di trasferimento
Sistemi automatici Modulo n°1 Classe V ELS a.s.2006-05 Funzioni di trasferimento In questo modulo viene preso in considerazione un operatore matematico detto trasformata di Laplace che consente di semplificare notevolmente le operazioni relative a sistemi lineari e tempo- invarianti.
Sistemi lineari
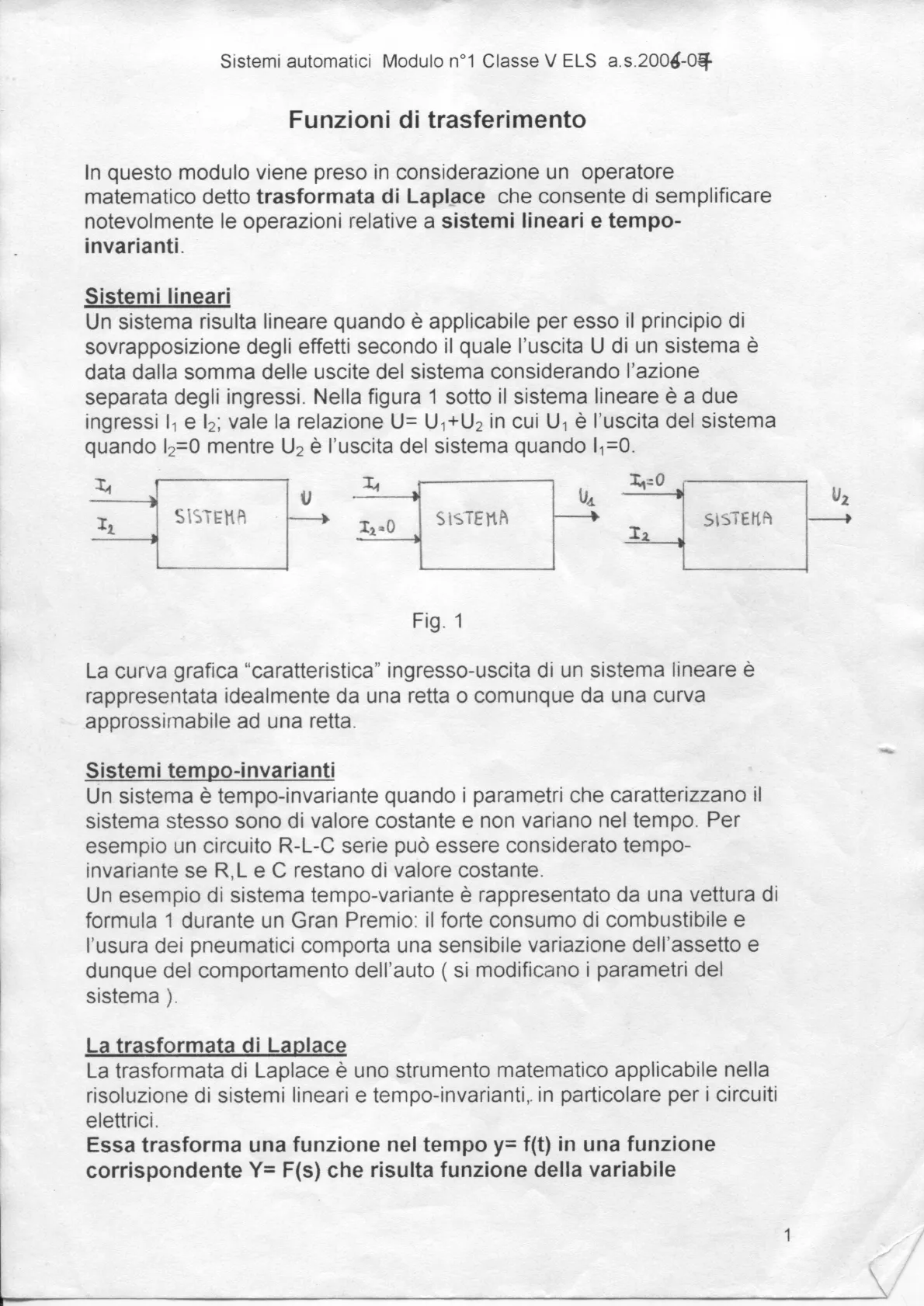
Un sistema risulta lineare quando è applicabile per esso il principio di sovrapposizione degli effetti secondo il quale l'uscita U di un sistema è data dalla somma delle uscite del sistema considerando l'azione separata degli ingressi. Nella figura 1 sotto il sistema lineare è a due ingressi 11 e 12; vale la relazione U= U1+U2 in cui U1 è l'uscita del sistema quando l2=0 mentre U2 è l'uscita del sistema quando l1=0.
In In In = 0 U Us U2 I2 SISTEMA SISTEMA SISTEMA I2=0 I2 Fig. 1 La curva grafica "caratteristica" ingresso-uscita di un sistema lineare è rappresentata idealmente da una retta o comunque da una curva approssimabile ad una retta.
Sistemi tempo-invarianti
Un sistema è tempo-invariante quando i parametri che caratterizzano il sistema stesso sono di valore costante e non variano nel tempo. Per esempio un circuito R-L-C serie può essere considerato tempo- invariante se R,L e C restano di valore costante. Un esempio di sistema tempo-variante è rappresentato da una vettura di formula 1 durante un Gran Premio: il forte consumo di combustibile e l'usura dei pneumatici comporta una sensibile variazione dell'assetto e dunque del comportamento dell'auto ( si modificano i parametri del sistema ).
La trasformata di Laplace
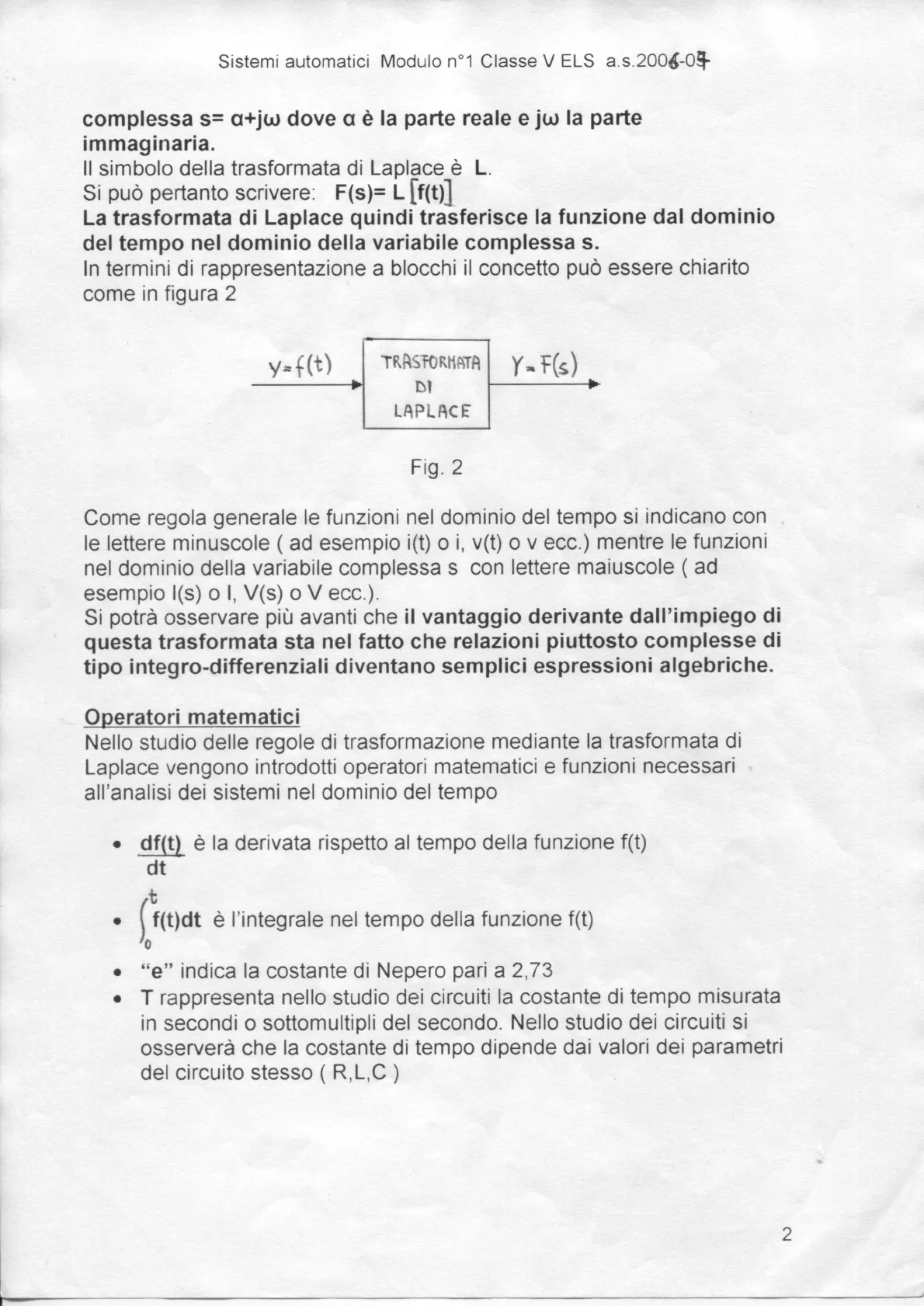
La trasformata di Laplace è uno strumento matematico applicabile nella risoluzione di sistemi lineari e tempo-invarianti, in particolare per i circuiti elettrici. Essa trasforma una funzione nel tempo y= f(t) in una funzione corrispondente Y= F(s) che risulta funzione della variabile 1Sistemi automatici Modulo nº1 Classe V ELS a.s.2006-09 complessa s= a+jw dove a è la parte reale e jw la parte immaginaria. Il simbolo della trasformata di Laplace è L. Si può pertanto scrivere: F(s)= L [f(t)] La trasformata di Laplace quindi trasferisce la funzione dal dominio del tempo nel dominio della variabile complessa s. In termini di rappresentazione a blocchi il concetto può essere chiarito come in figura 2
y=f(t) TRASFORMATA DI LAPLACE Y= F(s) Fig. 2 Come regola generale le funzioni nel dominio del tempo si indicano con le lettere minuscole ( ad esempio i(t) o i, v(t) o v ecc.) mentre le funzioni nel dominio della variabile complessa s con lettere maiuscole ( ad esempio I(s) o I, V(s) o V ecc.). Si potrà osservare più avanti che il vantaggio derivante dall'impiego di questa trasformata sta nel fatto che relazioni piuttosto complesse di tipo integro-differenziali diventano semplici espressioni algebriche.
Operatori matematici
Nello studio delle regole di trasformazione mediante la trasformata di Laplace vengono introdotti operatori matematici e funzioni necessari all'analisi dei sistemi nel dominio del tempo
- df(t) è la derivata rispetto al tempo della funzione f(t) dt
- f(t)dt è l'integrale nel tempo della funzione f(t)
- "e" indica la costante di Nepero pari a 2,73
- T rappresenta nello studio dei circuiti la costante di tempo misurata in secondi o sottomultipli del secondo. Nello studio dei circuiti si osserverà che la costante di tempo dipende dai valori dei parametri del circuito stesso ( R,L,C )
2Sistemi automatici Modulo nº1 Classe V ELS a.s.2006-05 Due funzioni di interesse notevole nello studio dei circuiti sono:
- y= 1-e- che è la funzione esponenziale crescente che all'istante 0 ha valore nullo e raggiunge il valore di regime 1 in un tempo pari a circa 5T.
. y= e-t/T che è la funzione esponenziale decrescente che all'istante 0 ha valore 1 e si annulla in un tempo pari a circa 5T
Regole di trasformazione
- LIK*f(t)]= K L [f(t) = K*F(s) cioè la trasformata di Laplace del prodotto di una costante K per una funzione f(t) nel tempo è pari al prodotto della costante per la trasformata F(s) della funzione f(t)
- L[df(t)}= s*F(s) dt cioè la trasformata di Laplace della derivata di una funzione f(t) è uguale alla trasformata F(s) moltiplicata per s
- Lf(t) dt = F(s) / s cioè la trasformata di Laplace dell'integrale di una funzione f(t) è pari alla trasformata F(s) della funzione divisa per s
- La trasformata di Laplace di una funzione esponenziale crescente y= f(t)= 1-e-t/T è Y=F(s)= s*(1+ST) 1
- La trasformata di Laplace di una funzione esponenziale decrescente y= f(t)= e-t/T è Y=F(s)= 1 (1+sT)
- La trasformata di Laplace della somma o della differenza di due funzioni nel tempo y= f1(t) e y= f2(t) è data dalla somma o differenza delle relative trasformate cioè: L [f](t)+f2(t)]=F1(s)+F2(s)
Teoremi sui limiti
Teorema del valore iniziale
Consente di determinare il valore iniziale di una funzione y= f(t) conoscendo la sua trasformata F(s) ed in particolare vale la relazione: lim f(t)= lim s*F(s) to 1000
Teorema del valore finale
Consente di determinare il valore finale di una funzione y= f(t) conoscendo la sua trasformata F(s) ed in particolare vale la relazione: lim f(t)= lim s*F(s) t-00 170 3Sistemi automatici Modulo nº1 Classe V ELS a.s.2006-05
Segnali di ingresso
I segnali più comuni in ingresso ad un sistema sono:
- L'impulso
- Il gradino
- La sinusoide
Il segnale di impulso ö è molto importante in quanto consente di descrivere matematicamente grandezze fisiche variabili con grande velocità. Il grafico di figura 3 riporta la funzione impulso caratterizzata, in termini intuitivi, da durata At infinitesima e ampiezza infinita. La trasformata di Laplace dell'impulso è 1, quindi Y=o(s)=1
y At t Fig.3 Nello studio dei sistemi la funzione impulso è importante per l'analisi della stabilità del sistema (risposta all'impulso). La funzione gradino è rappresentata in figura 4 ed è indicata con la notazione y=a*1(t) dove a è l'ampiezza del gradino. La trasformata di Laplace della funzione a gradino è Y=a*1(s)= a / s
y A -300 0 a 1 t Fig.4 Nello studio dei sistemi la funzione gradino è interessante perché permette di definire alcuni parametri che descrivono le caratteristiche dinamiche del sistema (es. la costante di tempo). 4Sistemi automatici Modulo nº1 Classe V ELS a.s.2006-09 La sinusoide è un segnale analogico cioè caratterizzato dal fatto che i suoi valori variano con continuità nel tempo e il cui andamento è rappresentato in figura 5
AM- LA T 7 0 - AM Fig.5 La funzione sinusoidale passante per l'origine degli assi è indicata dalla formula y= AMsenwt in cui AM è l'ampiezza dell'onda mentre w è la pulsazione della sinusoide legata alla frequenza f dalla relazione w= 2nf Il segnale sinusoide è importante nello studio dei sistemi ( in particolare di quelli elettrici) perché permette di analizzare il comportamento al variare della frequenza.
Parametri base dei circuiti elettrici
I parametri base di un circuito elettrico (resistenza R,induttanza L di una bobina e capacità C di un condensatore) possono essere visti come blocchi con un ingresso (es.corrente) e una uscita (es.tensione).
Resistenza
is (t) R v (t) Vale la relazione nel dominio del tempo v(t)= R*i(t) secondo la legge di Ohm. Trasformando secondo Laplace in base alla regola 1 di pagina 3, risulta nel dominio della variabile complessa s V(s)= R*I(s)
Induttanza
i (t) L v (t) Vale la relazione nel dominio del tempo v(t)= L*di(t) dt 5Sistemi automatici Modulo nº1 Classe V ELS a.s.2006-09 Trasformando secondo Laplace in base alle regole 1 e 2 di pagina 3 risulta nel dominio della variabile complessa s V(s)= s*L*I(s)
Capacità
i(t) C v(t) t Vale la relazione nel dominio del tempo v(t)= 1* i(t)dt C 0 Trasformando secondo Laplace in base alle regole 1 e 3 di pagina 3 risulta nel dominio della variabile complessa s V(s)= 1 *I(s). SC Nel dominio della variabile complessa s i tre blocchi possono essere rappresentati come in figura 6 sotto in cui le funzioni di trasferimento sono rispettivamente R, sL e 1/sC.
I(1) V(A) I (1) AL 1 1C Fig.6 Nel caso in cui invece la grandezza di ingresso è la tensione e quella di uscita la corrente risulta come in figura 7.
V(1) 1 R I(1) V(1) 1 AL I ( 1 ) V(1) I(1) AC Fig.7 I(1) V(A) V (s) R
Esempi di funzioni di trasferimento con circuiti elettrici
Esempi di funzioni di trasferimento con circuiti elettrici (poli,zeri e costanti di tempo) La funzione di trasferimento di un blocco che rappresenta un componente, è il legame matematico tra uscita ed ingresso. Negli esempi che seguono si anda a determinare in termini letterali la funzione di trasferimento G(s) nel dominio della variabile complessa s. Nello studio dei circuiti elettrici si pone a propria scelta una grandezza di ingresso ed una grandezza di uscita; quindi per uno stesso circuito elettrico in un caso la tensione può risultare l'ingresso e la corrente l'uscita del sistema, in un altro caso può essere il contrario. In un altro caso le grandezze di ingresso e di uscita possono entrambe essere tensioni, ad esempio la tensione su una resistenza e la tensione del generatore. 6Sistemi automatici Modulo nº1 Classe V ELS a.s.2006-09
Esempio 1
R i NR 4 L Fig.8 Si considera il circuito R-L serie di figura 8 con R ed L costanti nel tempo. Si pone la tensione v del generatore come grandezza di ingresso e la corrente i come grandezza di uscita per cui la funzione di trasferimento nel dominio del tempo G(t)= i/v. Nel dominio del tempo e per il 2° principio di Kirchoff si può scrivere: v(t)= VR+VL= R*i+L*di dt Applicando la trasformata di Laplace risulta V(s)= R*I(s)+sL*I(s) quindi raccogliendo l(s) V(s)= ( R+sL )*I(s) da cui si ricava che l(s)= 1 _* V(s) ( R+SL ) Considerando la tensione come grandezza di ingresso e la corrente come grandezza di uscita, la funzione di trasferimento è pari a: G(s)= I(s) = 1 V(s) R+SL La funzione di trasferimento G(s) è stata determinata ma è preferibile esprimerla nella forma G(s)= Gst./ (1+sT) dove Gst. è il guadagno statico cioè il guadagno in condizioni di regime. Per fare ciò si moltiplicano numeratore e denominatore per il termine 1/R e la relazione risulta: G(s)= 1/R = 1/R =1 1 1/R*(R+SL) 1+sL/R R 1+ST con T= L/R costante di tempo del circuito misurata in secondi o suoi sottomultipli. Il sistema considerato è un sistema che ha un solo polo. Il polo rappresenta una soluzione nella variabile s del denominatore. Nel caso in esame il denominatore si annulla quando 1+sT=0. 1+sT=0 da cui sT =- 1 e quindi s= - 1/T. L'unico polo presente è pertanto p1= - 1 / T. I poli hanno sempre la dimensione dell'inverso di un tempo ( es s-1) e sono generalmente di segno negativo. Un polo positivo è indice di un sistema instabile. 7
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
