Fondamenti di Robotica: dinamica dei manipolatori e formulazioni
Slide del Prof. Bruno Siciliano su Fondamenti di Robotica. Il Pdf esplora la dinamica dei manipolatori, le formulazioni di Lagrange e Newton-Eulero, le proprietà dei modelli dinamici e l'identificazione dei parametri, utile per lo studio universitario di Informatica.
Mostra di più68 pagine

Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
DINAMICA
- equazioni del moto del manipolatore in funzione delle forze e momenti agenti su di esso
Formulazione di Lagrange
Proprietà notevoli del modello dinamico Identificazione dei parametri dinamici
Formulazione di Newton-Eulero
Dinamica diretta e dinamica inversa Modello dinamico nello spazio operativo Ellissoide di manipolabilità dinamica Scalatura dinamica di traiettorie
FONDAMENTI DI ROBOTICA Prof. Bruno SICILIANO
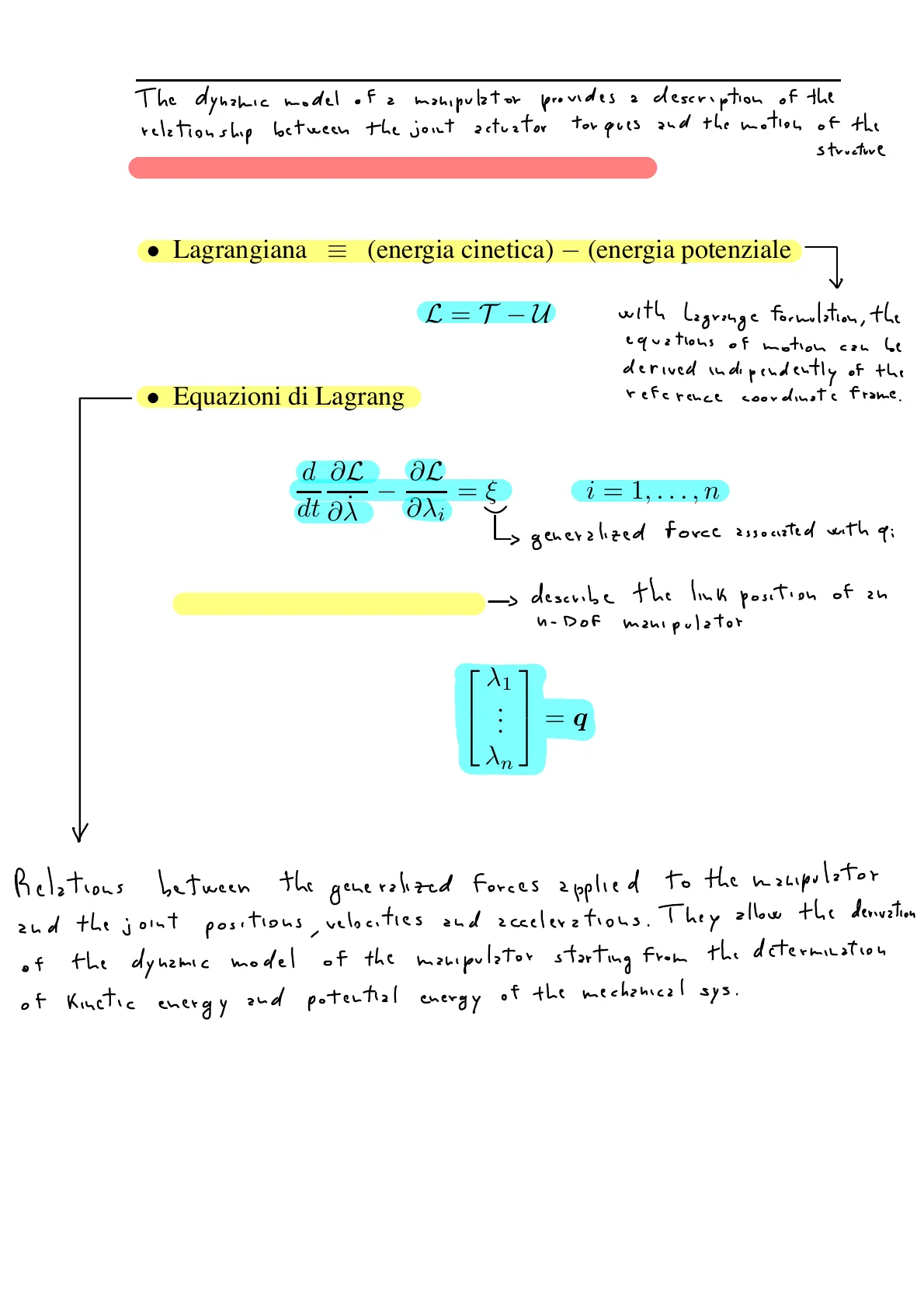
The dynamic model of a manipulator provides a description of the relationship between the joint actuator torques and the motion of the structure
FORMULAZIONE DI LAGRANGE
- Lagrangiana = (energia cinetica) - (energia potenziale)
L=T-U
>
with Lagrange formulation , the equations of motion can be derived independently of the reference coordinate frame.
- Equazioni di Lagrange
d dt dá −
= i=1, ... ,n
generalized force associated with qi * coordinate generalizzate -> describe the link position of an 4-DOF manipulator .
. . 1 = q n
Relations between the generalized forces applied to the manipulator and the joint positions , velocities and accelerations . They allow the derivation of the dynamic model of the manipulator starting from the determination of Kinetic energy and potential energy of the mechanical sys .
Prof. Bruno SICILIANO FONDAMENTI DI ROBOTICA
- Esempio
Cm m 28 Im I 1. Fm mg
* energia cinetica T = 192 + -Imk2, 92
* energia potenziale u= mgl(1 - cos1)
* lagrangiana 1 L= = 102+~Imk292 -mgl(1 -cos1) 2 2
* equazione del moto (I + Imk2)v + mgl sin v = { = T - FÅ - Fmkrů
FONDAMENTI DI ROBOTICA Prof. Bruno SICILIANO
Energia cinetica
- Contributo bracci + attuatori
Consider a manipulator with in rigid links. The total Kinetic energy is given by the sum of the contributions relative to the motion of each link and the contribution relative to the motion of each joint actuator
n T = >(Tea + Tmi) i=1
Kinetic energy of the motor actuating Jonti
Kinetic energy of Linki
>
- Braccio i
Wi 1 Pli - ri D - Pli 10 .* - 1 A 20 yo
where p* denotes the linear velocity vector and p is the density of the elemen- tary particle of volume dV; Ve; is the volume of Link i.
Te: = 1 2 J Vei *T; pi pipdV
* baricentro pei = 1 mli JVei På pdV
* velocità lineare della particella elementare p* = pe + wi X Ti = Pe; + S(wi)ri
FONDAMENTI DI ROBOTICA Prof. Bruno SICILIANO
The Kinetic energy of each link is formed by the contribution
- Traslazionale
link mass 1 2 Pe, PlipdV = 1 2 -me, Pe Pli .T Vei
linear velocity 1 of the centre of mass
- Mutuo
e 2 1 2 Pli TS(wi)ripdV = Vej
position vector of the elementary particle 2 1 Pli . T S(wi) 1. pi - Pei)pdV Vei =0
position velocity 7 of the centre of angular velocity of the link
- Rotazionale
1 2 rĮ ST (wi)S(wi)ripdV = 1 3 T 2 2 1 2 wi i TIe.wi Vei ST (ri)S(ri)pdV wi Vei
inertia tensor of the link Frame * tensore di inerzia relative to the centre of mass of Linki when expressed in the base frame ((r2 +r2) pdV - frixTiy pdV - JTixrizpdV Ie: = * S(r2x +122)pdV - friyrizpdV * * [(r2 +r24)pdV -Ilixy - Il ;xz = * Il y -Iliyz * * Il izz
the position of Link i depends on the manipulator configuration and thus the mertia Tensor is configuration- dependent
FONDAMENTI DI ROBOTICA Prof. Bruno SICILIANO
- Energia cinetica del braccio ¿ - )
Ottained by sunning the translational and rotational contributions.
Tei = - me; Pe Pli 1 + -w . T 1 2 T i. R¡Te R; Wi = - meq p 1 2 .T J(i)TJ q + 90 q˙ q˙
* velocità lineare -> O
It is necessary to express the Kinetic energy as a function of the joint variables. To this end , the geometrie method For Jacobian computation can be applied to The intermediate ( li ). pe; = Jp1 91 + ... + Jp; qi = Jp q link other than the end-effector.
( li) Jpj = Zj-1 Zj-1 X (Pli - Pj-1 per un giunto prismatico per un giunto rotoidale
* velocità angolare (li) . Wi = Jo1 91 + .. . +Joi li = (li) . O (li) Joj = 0 Zj-1 per un giunto prismatico per un giunto rotoidale
FONDAMENTI DI ROBOTICA Prof. Bruno SICILIANO
the Kinetic energy contribution of the motor of Joint i can be computed
- Motore i (elettrico rotante)
-> assuming that the contribution of the Fixed part (stator) is included in Wmi.
that of the link on which such motor Is located , and thus p the sole contribution of the rotor is to mi 1 be computed. So we need to locate - the motors as close as possible to the Pmi 1 base of the manipulator so as to lighten the 20 dynamic load of the first joint of the chain . yo 20
* trasmissione rigida Wmi =Wi-1 + Kridizmi
FONDAMENTI DI ROBOTICA Prof. Bruno SICILIANO
- Energia cinetica del rotore i
1 Tmi = 5mmi Pm; Pmi T 1 2 + -wmi T Im; Wmi 1 T T(mi)TJ(mi) q+ 9 1. T T(mi)T O Rm; Imi RT J mi q
where mm; is the mass of the rotor, pm, denotes the linear velocity of the centre of mass of the rotor, Im, is the inertia tensor of the rotor relative to its centre of mass, and wm, denotes the angular velocity of the rotor.
* velocità lineare .(mi) P = (mi) JP1 (mi) JP,i-1 0 . 0 (mi) JPj Zj-1 = Zj-1 X (Pmi - Pj-1 per un giunto prismatico per un giunto rotoidale
* velocità angolare Jmi) = J01 (mi) (mi) Jo,i-1 Joi 0 . . . . 0 (mi) = (li) Joj j=1, ... ,i-1 Joj krizmi j=i ( mi ) ... 2 - mm ; q =
FONDAMENTI DI ROBOTICA Prof. Bruno SICILIANO
- Energia cinetica totale
-> by summing the various contributions relative to the single links and single rotors, the total kinetic energy of the manipulators with actuators is given by the quadratic form
1 2 n n 1 2 V i=1 j=1
- Matrice di inerzia
B(g) => i=1 n me; J(li)T.J(li) + JUTRI; RT J +mm J(mi)TJ(mi) + J(mi) Rmi- mi miJ(mi) mi
* simmetrica * definita positiva * dipendente dalla configurazione (in generale)
Prof. Bruno SICILIANO FONDAMENTI DI ROBOTICA
Energia potenziale
the potential energy stored in the manipulator is given by the sum -> of the contributions relative to each link as well as to each rotor
n u =>(Ue: + Umi) i=1
- Braccioi> the contribution due only to grantational forces
go Pi pdV = - ml; go Pli T Ue; = - JVei
gravity acceleration vector in the base Frans .
- Rotore i
T Umi = - mmi go Pmi
- Energia potenziale totale
u =- >(me, 90 Pli + mm; 90 Pm;) n T T i=1
7 Potential energy , through the vectors pli and pri is a function only of the joint variables of , and not of the joint velocities "
FONDAMENTI DI ROBOTICA Prof. Bruno SICILIANO
Equazioni del moto
Having computed the total Kinetic and potential energy of the sys , we can compute the Lagrangian for the manipulator-> L= T-U
L(q, q) = T(q, q) -u(q)
1 n n T me; go pe; (q) +mmi 90 Pmi q T = 2 bij(q)qi9;+ n i=1 i=1 j=1
L where U does not depend on q
- Equazioni di Lagrange
B(q)q+ n(q, q) = { T n(q,q) = B(q)q- - dq ∂ 1 + 2 1 (qTB(q)q T au(q) 1 d dt 1 1 = d dt aT j=1 n bij(q)äj + n dbij(q) dt qj j=1 n = qkaj j=1 1 2 n n dqi Objk (q) qkaj j=1 k=1 au j=1 n me go T дре, aqi + mm; 90 T ogi Opmj дq n = - mej 90 Jpi (9) + mmj 90 JPi T (mj) (g) j=1 = gi(q) n n Obij(q) дак j=1k=1 aT
Prof. Bruno SICILIANO FONDAMENTI DI ROBOTICA
- Equazioni del moto
n j=1 n n bij (q)qj+> > hijk (q)qkqj+gi (g) = {i j=1 k=1 i=1, ... ,n
ove hijk = abij 0gk − 1 0bjk 2 0gi
* termini in accelerazione
- il coefficiente bij rappresenta il momento di inerzia visto all'asse del giunto i, nella configurazione corrente del manipolatore, quando gli altri giunti sono bloccati
- il coefficiente bij tiene conto dell'effetto dell'accelerazione del giunto j sul giunto i
* termini quadratici in velocità
- il termine hijje; rappresenta l'effetto centrifugo indotto al giunto i dalla velocità del giunto j; si noti che hiji = 0, poiché Obii /dqi = 0
- il termine hijkqjÖk rappresenta l'effetto di Coriolis indotto al giunto i dalle velocità dei giunti j e k
* termini dipendenti solo dalla configurazione
- il termine gi rappresenta la coppia generata all'asse del giunto i nella configurazione corrente del manipolatore per effetto della gravità
Some joint dynamic couplings may be reduced or zeroed when designing the structure , so as to simplify the control problem .
FONDAMENTI DI ROBOTICA Prof. Bruno SICILIANO
- Forze non conservative
A coppie di attuazione T diagonal matrix of viscous friction coefficients
* coppie di attrito viscoso - Fuq > Coulomb Friction
A coppie di attrito statico - fs (q, q) ~ - Fssgn (q) * coppie di bilanciamento di forze di contatto - JT (q)h vector of force and moment exerted by the end-off. environment
- Modello dinamico nello spazio dei giunti
VV B(q)q+C(q,q)q+F,q+fs(q)+g(q) =T - JT(q)he suitable (uxw) matrix such that its elements cij satisfy the equation 2 n Cijq = j=1 j=1 k=1 n n hijk qkaj V
The choice of the matrix C is not uniquesince there exist several matrices C whose clement satisfy the above condition.
Prof. Bruno SICILIANO FONDAMENTI DI ROBOTICA
PROPRIETÀ NOTEVOLI DEL MODELLO DINAMICO
-> two notable properties of the dynamic model are presented
Anti-simmetria della matrice B - 2C
Elaborating the term on the right-hand side DE huskies and the expressions j=1k=1 of the coefficients hik in high-ban- n j=1 Ciją; = >> n j=1 k=1 n hijkąkaj => n n 1 0bjk 2 0gi qkqj n n Obij 1 2 j=1 k=1
- Elementi di C
n Cij = Cijkİk k=1
* simboli di Christoffel del primo tipo Cijk = - 2 1 0qk Obij + Obik dqj − Objk Ogi
Proprietà notevole
-> of the equations of motion !
- N(q,q) = B(q) -2C(q, q) = - N'(q, q
> Is Skew- symmetric qkqj = 1 2 дqк j=1k=1 qkaj j=1 k=1 n Obij Әqк n Obik dqj Objk Ogi − − 1 Objk
FONDAMENTI DI ROBOTICA Prof. Bruno SICILIANO
- Elementi di C
2 n Obij дqk qk +~ 1 n Obik dqj Objk Ogi − qk k=1 k=1 0qj Obik Objk Oqi − qk k=1
- Elementi di N
nij = bij - 2Cij = k=1 n Oqi dbjk Obik − qk = - nji dqj
given zny ( hx 1 ) vector w , the Following relation holds wTN(q, q)w=0 Vw
* se w = q: V 7 q™N(q,q)q= 0 DA
this relation holds for any choice of the matrix C , since it is a result of the principle of conservation of energy (Hamilton)
⇓ 1 . =- bij + 1 n
FONDAMENTI DI ROBOTICA Prof. Bruno SICILIANO
DIM ( VC )
- Principio di conservazione dell'energia (Hamilton)
The total time derivative of Kinetic energy is balaned by the power generated by all the forces acting on the manipulator joints . For the mechanical sys
1 d 2 dt qTB(qq =q T-F,q-fs(q) -g(q) - JI(q)he)
taking the derivative on the left-hand side .
1 d 1.7 q B(q)q) = - q B(q)q+q B(q)q 2 dt 2
substating 2 B(q)q + C(q,q)q+ Fvq+Fssgn(q)+g(q) =T - JT(q)he =qT(B(q) - 2C(q, q))q +q T- F,q - fs(q) - g(q) - JT (q)he)
In conclusion , the relation q N ( g , ) q = 0 holds for any choice of the matrix C since it is direct consequence of the physical properties of the sys , while wTN(q, a) w = 0. holds only for the particular choice. of the elements of C.
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
