Fisica del corpo rigido: cinematica e dinamica del moto rotatorio
Slide da Alma Studiorum Parmensis su fisica del corpo rigido. Il Pdf è una presentazione didattica di Fisica I, che copre cinematica e dinamica del moto rotatorio, momento d'inerzia e momento angolare, con esempi e considerazioni qualitative.
Mostra di più18 pagine

Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
Lezione 14
Equilibrio statico del corpo rigido . Schema risoluzione problemi di statica Cinematica del moto rotatorio . Coordinata, velocità ed accelerazione angolare . velocità angolare costante . accelerazione angolare costante Relazioni tra grandezze lineari ed angolari Cap. 11 Gettys Lezione 13 Cap. 12 Gettys
- Cinematica del rotolamento di un corpo rigido Dinamica del moto rotatorio
- Momento d'inerzia da energia cinetica rotazionale
- Momento d'inerzia di un sistema di punti materiali · Momento d'inerzia di un sistema continuo . Momento angolare di un punto materiale Cap. 12 Gettys Cap. 13 Gettys
STUDIORU UNIVERSI UM . ALMA · A · PARMENSIS A.D. 962 P. Mazzolini Fisica I - LT Chimica 1Cinematica del moto di rotolamento di un corpo rigido
Cinematica del moto di rotolamento
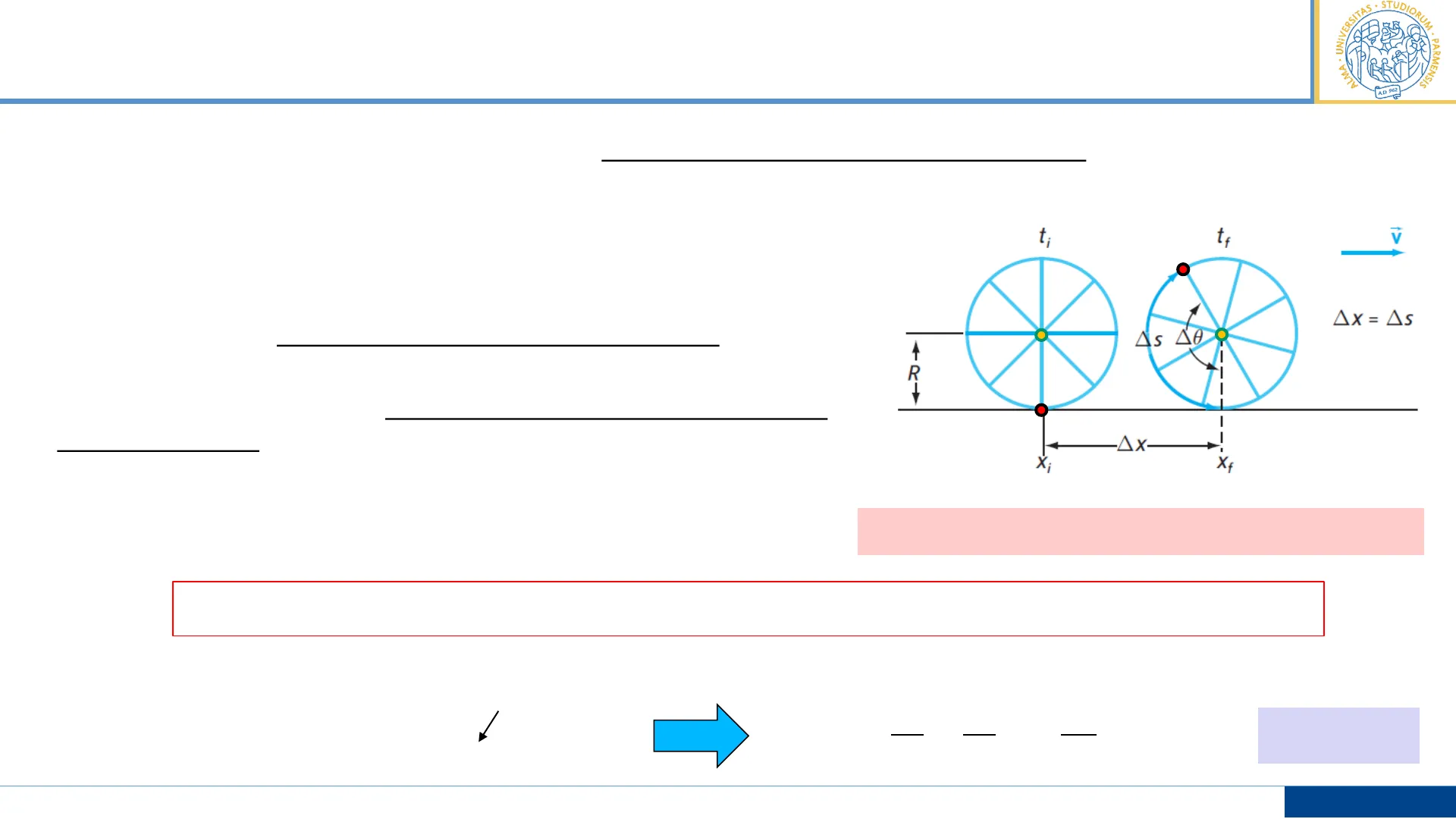
STUDIORU UNIVERSI UM . ALMA · A · PARMENSIS A.D. 962 Nel moto di rotolamento affrontiamo il caso di un asse di rotazione che NON è fisso, ma trasla Consideriamo ruota su terreno piano. Accenniamo che è cardine per avere moto di puro rotolamento la forza di attrito statico ruota/terreno (vedremo poi tramite dinamica) > Se non ci fosse ruota rimarrebbe ferma ruotando su se stessa (centro di massa non traslerebbe) In moto di puro rotolamento l'attrito presente tra ruota e pavimento è puramente statico (anche se qua non ce ne curiamo perché siamo in cinematica) > punto di contatto P istantaneo durante rotolamento. ti tf v Ax = As As 40 R AX Xi Rotolamento = traslazione + rotazione Descrizione analitica (tramite cinematica) condizione di puro rotolamento -- > non essendoci scivolamento 4x = As 1 arco crf percorso da P in intervallo di tempo At (As = 40r) Scalare della velocità lineare (traslazionale) del cm Vcm = AX = AS = R = RW At At Vcm = Rw P. Mazzolini Fisica I - LT Chimica 2(1) Cinematica rotolamento come somma di pura traslazione e rotazione
Cinematica rotolamento: traslazione e rotazione
STUDIORU ERS UM · UNI ALMA . A · PARMENSIS A.D. 962 Prendiamo un generico punto del corpo in puro rotolamento -- > possiamo sempre descrivere il suo moto come una combinazione di rotazione + traslazione Q v V = A C C V - P P P (*) Traslazione + Rotazione = Rotolamento (*) Consideriamo solo i punti esterni (r = R) -- > il modulo della velocità lineare di puro rotolamento sarà sempre costante e tangente, ma è un vettore! Pura traslazione -- > ogni punto trasla rigidamente -- > possiede la medesima velocità lineare ৳ Pura rotazione -- > il vettore velocità v del generico punto avrà solo una componente scalare tangenziale vt. Più in genere, sappiamo che per ogni punto del corpo considerato 1 = @ x F Vp = Ủcm + W xr P. Mazzolini Fisica I - LT Chimica 3 2v V C V + A -(2) Moto rotolamento come rotazione istantanea per punto contatto P
Moto rotolamento: rotazione istantanea per punto P
STUDIORU UNIVERSI UM . ALMA · A · PARMENSIS A.D. 962 Il rotolamento da un altro punto di vista: A 2v V C P Possiamo intendere il rotolamento come una rotazione rispetto all'asse ortogonale alla direzione del moto e passante istantaneamente per il punto P Il punto di contatto P è istantaneamente in quiete e l'asse di rotazione passa per quel punto Tutti i punti del corpo per definizione avranno la stessa velocità angolare -- > @ Le velocità lineari istantanee 1 dei diversi punti del corpo hanno direzione perpendicolare ai segmenti che li congiungono all'asse di rotazione istantaneo (distante r rispetto al punto di contatto P) e moduli proporzionali alla lunghezza di quei segmenti -- > Vt = rw Es. il punto A posto all'estremo opposto al punto P e giacente sulla stessa retta d'azione del centro avrà modulo di velocità doppio rispetto a C -- > VA= 20℃ P. Mazzolini Fisica I - LT Chimica 4
Dinamica del moto rotatorio
STUDIORU UNIVERSI UM . A · PARMENSIS ALMA · A.D. 962 Dinamica del moto rotatorio P. Mazzolini Fisica I - LT Chimica 5Energia cinetica di rotazione e momento d'inerzia
Energia cinetica di rotazione e momento d'inerzia
VERSI UM . UNI ALMA · A · PARMENSIS A.D. 962 Consideriamo un generico corpo rigido che compie una rotazione rispetto ad una asse fisso O. Possiamo considerare il corpo come un insieme di punti materiali aventi tutti velocità lineari/tangenziali differenti (in funzione della loro distanza dal centro) -- > per ricavare l'energia cinetica complessiva del corpo rigido in rotazione sommiamo tutti i contributi delle n i-esime particelle: V1 m2 m1 O x Sapendo che ogni particella ha la medesima velocità angolare @z = Vi ri -- > posso esprimere la K: K = 1 2 n > > mi (W2 ri) 2 = 1 2 WZ 2 i=1 n miri 2 Momento d'inerzia Io = > mir? Dimensioni [ML2] e si misura nel SI in [kg m2] Energia cinetica di rotazione 1 K= = 10wz i=1 P. Mazzolini Fisica I - LT Chimica 6 K = n Σ i=1 1 2 miv? ,2 STUDIORU y V2Confronto energia cinetica traslazionale e rotazionale corpo rigido
Confronto energia cinetica traslazionale e rotazionale
STUDIORU UNIVERSI UM . ALMA . A · PARMENSIS A.D. 962 Energia cinetica di rotazione 1 2 2 Z 1 K = - mvcm 2 Energia cinetica di traslazione Vediamo che il momento d'inerzia è l'analogo rotatorio della massa nel caso di un moto traslazionale (m come inerzia traslazionale) -- > nella rotazione dobbiamo considerare non solo la massa del corpo, ma come questa è distribuita rispetto all'asse di rotazione del corpo stesso lo = > min 2 Generalmente, un momento d'inerzia minore, a parità di velocità angolare, rende più facile una rotazione Facile ruotare l'asticella su quest'asse (a) Qualitativamente Asse di rotazione Più duro farlo su quest'altro asse (b) P. Mazzolini Fisica I - LT Chimica 7Momento d'inerzia di un sistema di masse collegate rigidamente tra loro
Momento d'inerzia di un sistema di masse
STUDIORU UNIVERSI UM . ALMA · A.D. 962 ESEMPIO: 8 punti materiali con stessa massa (m1 = m2 = m3 ... = m) posti ai vertici di un cubo di lato a (barre di collegamento di massa trascurabile). Icm => miri = mirf + m2r2 + ... + mgrg Poniamo asse di rotazione z parallelo a spigolo "1-5" e passante per il centro di massa del cubo (intersezione diagonali) -- > 8 punti avranno medesimo r dall'asse z: 2 r= - a 2 1 + 1 2 ;a) =] 2 V4 2 a =a2 V2 Icm = 8m a V2 2 = 4ma2 Spostiamo l'asse di rotazione z lungo i punti 3 e 7 11 = 15 = Va2 + a2 = V2a 12 = 14 = 16 = 18 = a r3 = r7 = 0 13-7 = 4ma2 + 4ma2 = 8ma2 I NON è proprietà intrinseca del sistema: dipende da distribuzione delle masse in direzione perpendicolare ad asse rotazione P. Mazzolini Fisica I - LT Chimica 8 3 2 4 1 a Icm 7 6 - y a 8 5 a- X Z A · PARMENSISCalcolo del momento d'inerzia di un corpo rigido continuo
Calcolo del momento d'inerzia di un corpo continuo
STUDIORU JERSI UM . UNI ALMA · A · PARMENSIS A.D. 962 Consideriamo un generico corpo rigido esteso di densità uniforme p, in cui la sua massa è distribuita con continuità (non più solo masse discrete separate) -- > Dividiamolo in tanti piccoli volumetti uguali AVi La massa di ciascun i-esimo volumetto vale Ami = PAVi Possiamo esprimere il momento d'inerzia del corpo rigido esteso come 10 ~ Eamir? - ΣρανΤΖ Per descrivere precisamente il momento d'inerzia del corpo consideriamo volumetti sempre più piccoli (AVi -> 0) -- > tramite volumi infinitesimi dV esprimiamo la sommatoria come un integrale esteso sull'intero volume del sistema V Io = lim AVi->0 E DAVET? = [ .. Iv pr2 dV Io = ) v .2 pr-dV P. Mazzolini Fisica I - LT Chimica 9 y Ami = PAVi Ri XEsempio
Momento d'inerzia di un cilindro cavo
Momento d'inerzia di un cilindro (R2, h) cavo (R1) di densità uniforme (p) rispetto al suo asse di simmetria z passante per il suo centro di massa Icm- Scegliamo l'elemento di volume infinitesimo -- > corone circolari di altezza h, distanza dall'asse di rotazione R e larghezza infinitesima dR: dV = h(2TR) dR Integriamo poi fra R1 e R2 per avere il contributo di tutta la massa nella parte piena Icm - pR2v = R1 R2 R2 pR2 (h2TR)dR = 2Thp cost R1 R3 dR = 2Thp R4 4 R2 R1 = Z dR R h 1 - y R2- X 1 == hp (R - RA) E' utile esprimere questo risultato in funzione della massa del cilindro: sappiamo che il volume del cilindro cavo è pari a -- > V = Th (R2 - R2) e la sua massa può essere quindi espressa come -- > M = p 1th (R2 - R?) STUDIORU VERSI UM . UNI ALMA · A · PARMENSIS A.D. 962 P. Mazzolini Fisica I - LT Chimica 10 V 1 Icm = = pnh (R2 - R2)(R2 + R2) = 1 = >M(R2 +R})Momenti d'inerzia corpi rigidi noti ruotanti attorno ad asse di simmetria
Momenti d'inerzia di corpi rigidi noti
STUDIORU VERS UM- UNI ALMA A · PARMENSIS A.D. 962 Ro I = MR2 Cilindro o anello a parete sottile e asse longitudinale passante per C.M. (R1~Ro e R2~Ro) Ro L Cilindro o anello a parete sottile e asse ortogonale passante per C.M. Sfera cava a parete sottile e asse passante per C.M. Ro I = MR? Cilindro o disco pieno e asse longitudinale passante per C.M. Cilindro o disco pieno con asse ortogonale passante per C.M. Sfera piena a parete sottile e asse passante per C.M. L R2 1 = 1 MKR? + R2) 1 = 1 ML2 12 L Sbarretta piena sottile con asse ortogonale passante per C.M. b / = 1 M (a2 + b2) a 12 Lamina rettangolare con asse ortogonale passante per C.M. P. Mazzolini Fisica I - LT Chimica 11 Correggete per tutti mettendo il pedice -- > Icm (il momento s'inerzia è sempre valutato rispetto ad un asse, in questo caso passante per il centro di massa di ognuno di questi corpi) Ro I= MR2+1 ML2 1 =2 Mr2 R1 Cilindro cavo a parete spessa e asse longitudinale passante per C.M. 1= 를 MR 금 + 금 ML2 1 =2 Mr2Teorema degli assi paralleli (Huygens - Steiner)
Teorema degli assi paralleli (Huygens - Steiner)
STUDIORU ERS UM- UNI ALMA A . PARMENSIS A.D. 962 Il momento d'inerzia di un corpo è definito in funzione del suo asse di rotazione. Abbiamo visto come calcolarlo per un corpo rigido che ruota attorno ad un asse fisso passante per un suo asse di simmetria (per cm) -- > rispetto ad un asse arbitrario? Il teorema degli assi paralleli fornisce una relazione tra il momento d'inerzia rispetto ad un generico asse di rotazione passante per un punto P (Ip) ed il momento d'inerzia per un asse di rotazione parallelo al primo e passante per il centro di massa del corpo (/CM)- Centriamo gli assi cartesiani sul centro di massa CM del corpo (z uscente dal foglio), mentre l'asse di rotazione passa per il punto P (parallelo a z e uscente dal foglio) -- > XCM e YCM sono entrambi = 0 Distanza tra i due assi paralleli z e P (per il teorema di Pitagora) è: d = Va2 + b2 y m(x; yi) I y: - b Rpi y A P 1b d X cm -a-xi -a P. Mazzolini Fisica I - LT Chimica 12Teorema degli assi paralleli (Huygens - Steiner)
Teorema degli assi paralleli: dimostrazione
STUDIORU UNIVERSI UM. ALMA . A · PARMENSIS A.D. 962 Definiamo la distanza Rpi del generico punto i-esimo di massa m, dall'asse di rotazione P -- > possiamo esprimere Ip: Ip = >m;Rpi => mil(xi-a)2 + (Vi -b)2] = > mil(x} +a2 -2x;a) + (y} +b2 -2y;b)] = = >mi(x2 +y}) - 2a mixi - 2b Miyi +(a2 + b2) > mi Md2 ICM (coordinate x; ed y; valutate rispetto agli assi passanti per il centro di massa) Dalla trattazione del centro di massa sappiamo che E mixi = MxCM e Emiyi = MyCM E avendo posto il centro di massa all'origine degli assi, entrambi i termini si annullano Ip = ICM + Md2 y m(x , y ) Î y: - b Rpi y P ţb - d- X cm -a-xi -a Xp X P. Mazzolini Fisica I - LT Chimica 13
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
