Introduzione agli schemi elettrici industriali ed elettropneumatici di base
Documento di Formazione professionale sugli schemi elettrici industriali e elettropneumatici: gli schemi di base. Il Pdf illustra il funzionamento di circuiti base con contattori e relè, includendo esempi pratici e schemi per chiarire i principi di funzionamento della Tecnologia.
Mostra di più21 pagine

Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
Introduzione agli Schemi Elettrici Industriali e Elettropneumatici
Prima di iniziare lo studio delle tavole relative agli schemi elettrici industriali e agli schemi elettropneumatici, è opportuno presentare il funzionamento di alcuni schemi di base, che impiegano contattori e temporizzatori, utili per la comprensione di schemi più complessi. Innanzitutto vediamo di spiegare il concetto di autoalimentazione.
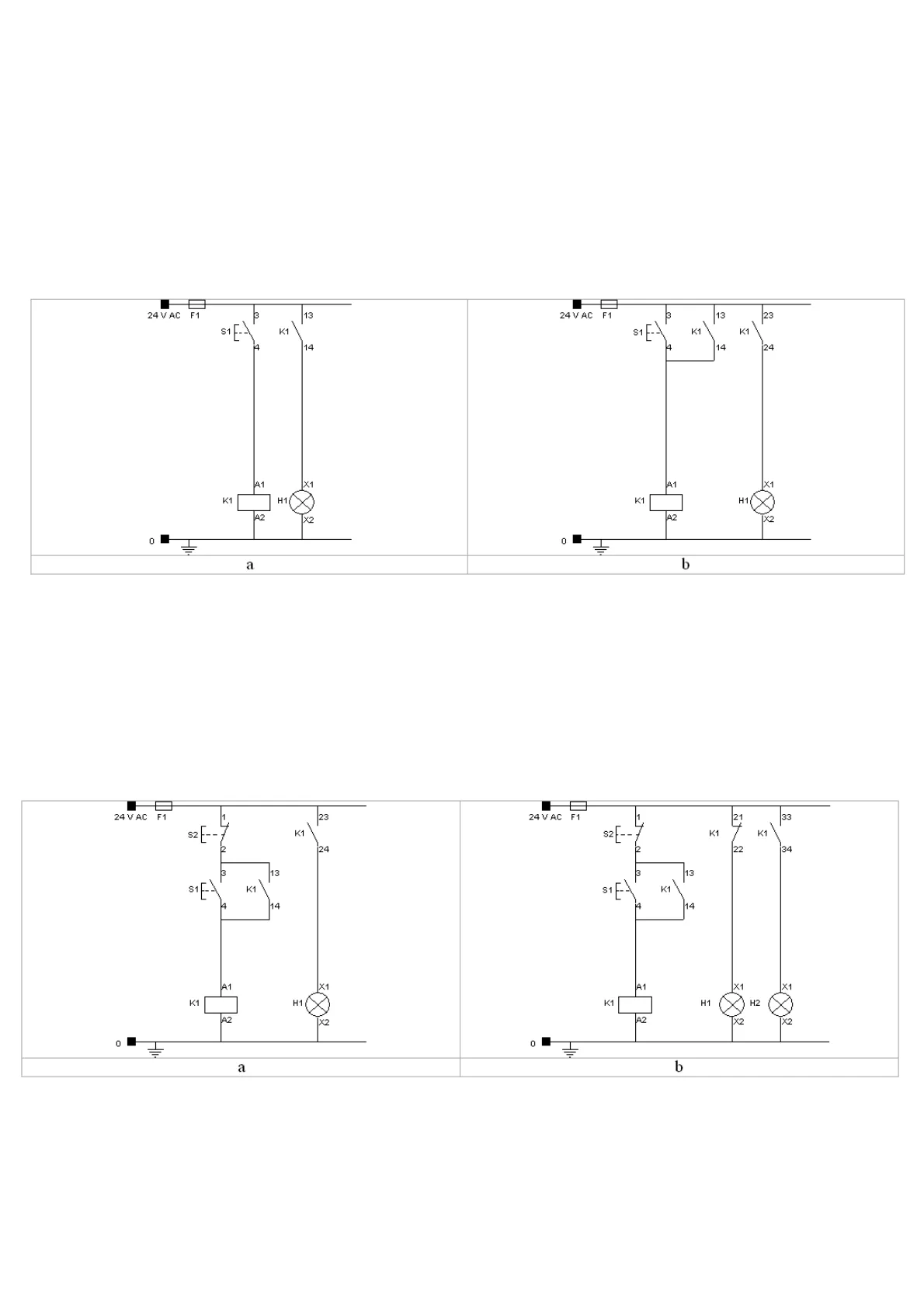
24 V AC F1 3 13 24 V AC F1 3 13 23 S1 K1 S1 K1 K1 4 14 4 14 24 A1 ×1 A1 ×1 K1 H1 K1 H1 A2 A2 X2 0 0 a b Fig. 3 - Esempi di circuiti base Si osservi lo schema mostrato nella fig. 3a. Premendo il pulsante S1, il contattore o relè K1 si eccita (morsetti A1-A2), di conseguenza il suo contatto cambia stato e la lampada H1 si accende. Rilasciando il pulsante S1, il contattore si diseccita e la lampada H1 si spegne. Volendo che la lampada rimanga accesa si deve modificare lo schema mostrato nella fig. 3a trasformandolo nello schema 3b.
Circuiti Base e Autoalimentazione
24 V AC F1 1 23 24 V AC F1 1 21 33 S2 -- K1 SZ K1 K 2 24 12 22 ¡34 13 3 13 S1 K S1 즈 4 14 4 14 A1 A1 X1 X: K1 H1 K1 H1 H2 A2 ×2 A2 ×2 0 0 a b Fig. 4 - Esempi di circuiti base 1 X2 ×2Si deve inserire in parallelo al pulsante S1 un contatto normalmente aperto NA (oppure NO = Normally Open) del contattore K1, detto contatto di autoalimentazione o di ritegno. Questo impedisce la diseccitazione di K1 e, anche rilasciando S1, la lampada H1 rimane accesa. Per diseccitare il contattore è necessario inserire in serie al circuito della bobina un pulsante S2 con un contatto normalmente chiuso (NC = Normally Close), come è possibile vedere nello schema di fig. 4a. Volendo segnalare l'eccitazione e la diseccitazione del contattore, si può procedere come mostrato nella fig. 4b. La lampada H2 si accende all'eccitazione del contattore K1, mentre la lampada H1 si accende solo quando il contattore K1 è diseccitato. A questo scopo si fa uso di un contatto NO e di un contatto NC di K1 (fig. 4b).
Comando di Motori Asincroni Trifase
Schema Funzionale per Motore Asincrono Trifase
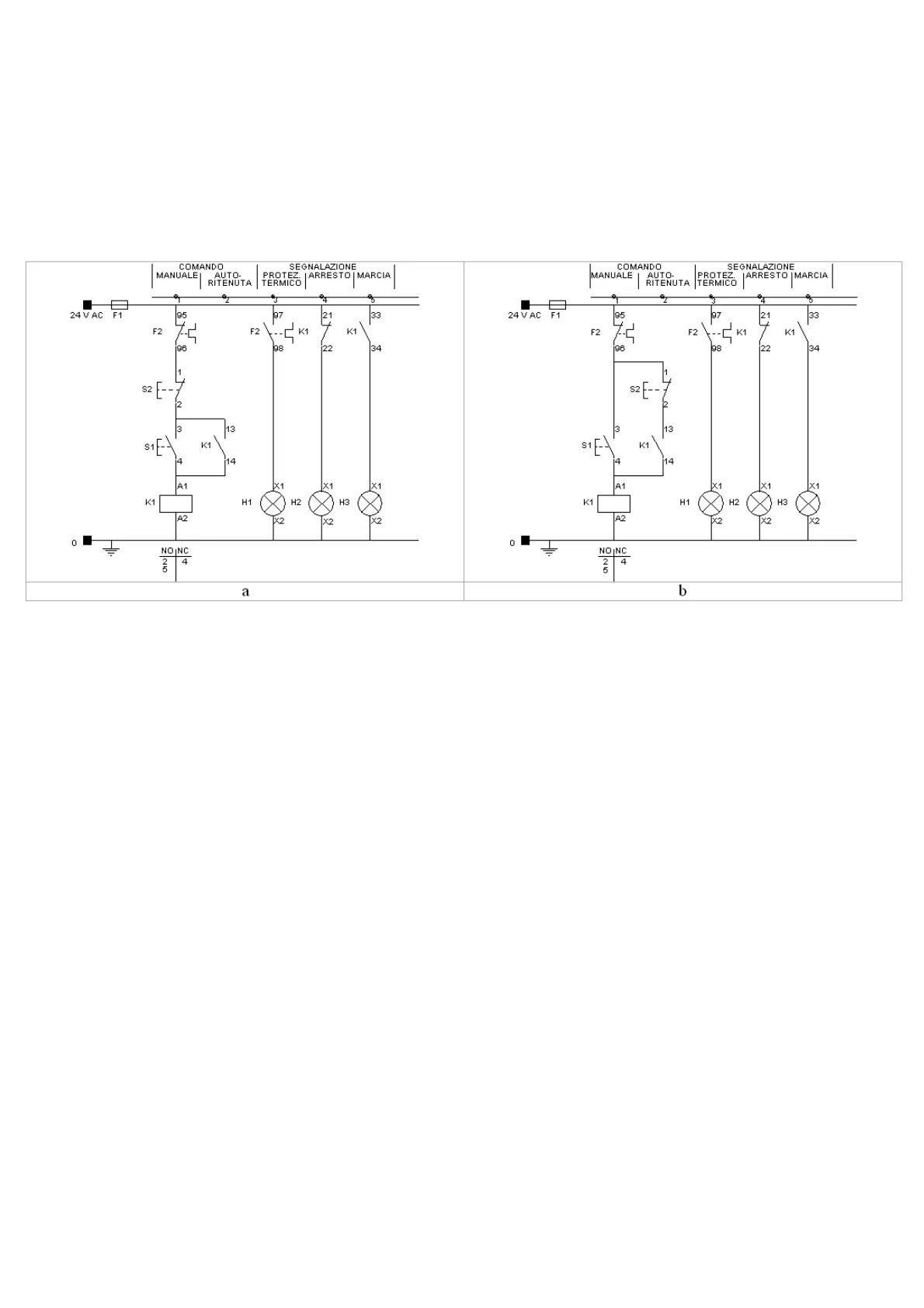
COMANDO COMANDO MANUALE AUTO- RITENUTA SEGNALAZIONE PROTEZ. | ARRESTO | MARCIA TERMICO MANUALE AUTO- RITENUTA PROTEZ. TERMICO RCIA 4 24 V AC F1 97 21 33 24 V AC F1 95 97 21 33 F2 F2 K1 K1 F2 T F2 K1 K1 196 98 22 34 96 98 i22 34 1 1 S2 --- S2 2 2 3 13 3 13 S1 K1 S1 K1 4 14 4 14 A1 IX X A1 ×1 X1 X1 K1 H1 H2 H3 K1 H1 H2 H3 A2 ×2 ×2 X2 ×2 X2 ×2 0 0 NONC NO |NC 25 4 4 a b Fig. 5 - Esempi di circuiti base Viene mostrata di seguito (fig. 5a) un'applicazione di ciò che è stato visto precedentemente, cioè lo schema funzionale per il comando di un motore asincrono trifase. Nello schema, infatti, possiamo trovare: il pulsante S1, che permette l'eccitazione del contattore di alimentazione del motore K1; il pulsante S2, per la diseccitazione di K1 (arresto del motore); il contatto NC (95-96) del relè termico F2, posto a protezione del motore, che permette la diseccitazione automatica di K1; il contatto NO (97-98) del relè termico F2 di alimentazione della lampada H1 che segnala l'intervento del dispositivo di protezione; le segnalazioni H2 e H3 alimentate, rispettivamente, da un contatto NC e NO di K1 che indicano lo stato di eccitazione di K1 (arresto e marcia del motore).
Priorità dei Comandi e Affidabilità
È interessante notare come il contatto NO di autoalimentazione di K1 sia in parallelo al pulsante S1 e come il comando di arresto S2 sia prioritario rispetto al comando di marcia (tenendo premuto S2, anche premendo S1 il contattore non si eccita). Negli schemi per il telecomando di motori e, più in generale, nell'automazione industriale viene scelta questa soluzione perché garantisce una maggiore affidabilità in fatto di sicurezza degli impianti. La soluzione proposta qui di seguito (fig. 5b), anche se dal punto di vista logico permette gli stessi risultati, non è altrettanto valida dal punto di vista della sicurezza. Infatti, in questo caso, se vengono premuti contemporaneamente i due pulsanti S1 e S2, è S1 a prevalere su S2, mantenendo eccitato il contattore K1, anche con il pulsante di arresto S2 premuto. In questo secondo caso, è il comando di marcia S1 ad essere prioritario rispetto al comando di arresto S2.In entrambi i casi le lampade di segnalazione H1, H2, H3 indicano, rispettivamente, l'intervento del relè termico F2, la diseccitazione e l'eccitazione di K1 (arresto e marcia del motore).
Interdipendenza tra Contattori
Prevenzione dell'Eccitazione Simultanea
Vediamo ora alcuni casi di interdipendenza tra contattori. I contatti NC possono servire anche per evitare che due o più contattori si eccitino contemporaneamente, come viene indicato nello schema di fig. 6a. Premendo il pulsante S2, si eccita il contattore K1 che rimane autoalimentato. Premendo ora il pulsante S3, 2 X1 A2 SEGNALAZIONE ARRESTO | MARCIA 4si eccita il contattore K2, il quale diseccita il contattore K1. Da notare che con K2 eccitato, premendo S2, il contattore K1 non si eccita (contatto di interblocco 21-22 di K2). Infine, se si preme il pulsante S1, si diseccita il contattore che è eccitato (K1 o K2). Completano lo schema due lampade di segnalazione che indicano quale dei due contattori è eccitato: H1 segnala l'eccitazione di K1, mentre H2 l'eccitazione di K2. Esaminiamo ora lo schema di fig. 6b dove, con il contattore K1 eccitato, non si possa eccitare K2 e viceversa. In questo esempio una volta che si è eccitato uno dei due contattori, il rispettivo contatto NC (21- 22) impedisce all'altro contattore di eccitarsi, anche se viene premuto il pulsante di marcia (contatto di interblocco). Infine se si preme il pulsante S1 si provoca la diseccitazione del contattore eccitato.
Schemi di Interblocco e Segnalazione
COMANDO CONTATTORE K1 COMANDO CONTATTORE K2 SEGNALAZIONE ECCITAZIONE K1 COMANDO CONTATTORE K1 COMANDO CONTATTORE K2 SEGNALAZIONE ECCITAZIONE K1 K2 24 V AC F1 23 33 24 V AC F1 1 33 33 K1 K2 S1 K1 K2 2 24 2 34 34 |3 13 3 13 3 13 3 13 S2 K1 S3 K2 4 14 4 14 4 14 4 14 21 21 21 K2 K2 K1 22 22 22 A1 A1 A1 A1 X. K1 K2 H1 H2 K1 K2 H1 H2 A2 ×2 1x2 A2 A2 X2 X2 0 0 a b Fig. 6 - Esempi di circuiti base Completano lo schema due lampade di segnalazione che indicano quale dei due contattori è eccitato; in particolare, H1 segnala l'eccitazione di K1, mentre H2 l'eccitazione di K2. Questo schema trova applicazione per effettuare il cambiamento del senso di rotazione di un motore asincrono trifase, oppure per effettuare il comando di due motori in modo tale che sia impossibile far funzionare i due motori contemporaneamente. Per segnalare, invece, la condizione di riposo dei due contattori si devono collegare in serie, alla lampada di segnalazione H1, i contatti NC di entrambi i contattori (K1 e K2), come viene mostrato nello schema di fig. 7 (lo schema è identico nel circuito di comando dei contattori alla fig. 6b).
Segnalazione Contattori Diseccitati
COMANDO CONTATTORE K1 COMANDO CONTATTORE K2 SEGNALAZIONE CONTATTORI DISECCITATI 4 24 V AC F1 1 31 $1 K1 32 3 13 3 13 31 K1 S3 K2 K2 14 4 14 32 21 2ª K2 K1 / 22 22 A1 <1 K1 K2 H1 A2 A2 ×2 0 Fig. 7 - Esempi di circuiti base 3 1 S1 --- 34 S2 K1 K2 X1 X1 S2 4 A2 K2Si vuole ora fare in modo che il contattore K2 si possa eccitare solo dopo l'eccitazione di K1. Dallo schema di fig. 8 si vede che il contattore K2 non si può eccitare se il contattore K1 non è eccitato (contatto di K1 23- 24 chiuso). Con i contattori entrambi eccitati, premendo il pulsante S3, si diseccita solo K2 senza provocare la diseccitazione di K1. Per diseccitare K1 è necessario premere il pulsante S1.
Sequenza di Eccitazione dei Contattori
COMANDO CONTATTORE K1 COMANDO CONTATTORE K2 4 24 V AC F1 1 1 S1 S3 2 2 3 13 3 13 S2 K1 K2 4 14 4 14 23 K1 24 A1 A1 K1 K2 A2 A2 0 Fig. 8 - Esempi di circuiti base
Interdipendenza alla Diseccitazione
COMANDO CONTATTORE K1 COMANDO COMANDO CONTATTORE K1 COMANDO CONTATTORE K2 - 3 24 V AC F1 1 1 21 24 V AC F1 1 1 23 S1 S3 K1 S1 -- K1 22 2 2 3 13 3 3 13 3 13 62 K1 S4 K2 S K1 34 -- K2 4 14 4 14 1 14 4 14 A1 A1 A1 A1 K1 K2 K1 K2 A2 A2 A2 A2 0 0 a b Fig. 9 - Esempi di circuiti base Vediamo ora due schemi che prevedono una interdipendenza tra due contattori alla diseccitazione. Si osservino gli schemi di fig. 9. Nel primo schema (fig. 9a) con il pulsante S4 si eccita il contattore K2, che si può diseccitare con il pulsante S3 solo se il contattore K1 è eccitato. Infatti, il contatto NC di K1 (21-22) cortocircuita il pulsante di arresto S3, impedendo la diseccitazione di K2. Il contattore K1, invece, si può eccitare e diseccitare indipendentemente da K2 premendo, rispettivamente, i pulsanti S2 e S1. Nel secondo schema (fig. 9b), invece, premendo il pulsante S4, il contattore K2 si eccita e si può diseccitare, a differenza dello schema precedente, solo se K1 è diseccitato. In questo caso è il contatto NO di K1 (23-24) a mettere in cortocircuito il pulsante di arresto S3 quando K1 è eccitato.
Funzionamenti Incerti negli Schemi Elettrici
Problemi di Autoalimentazione
4 2 2 24 13 CONTATTORE K2Anche in questo caso il contattore K1 si può eccitare e diseccitare indipendentemente da K2 premendo rispettivamente i pulsanti S2 e S1. Nella stesura degli schemi elettrici funzionali, però, si possono verificare dei funzionamenti incerti. Esaminiamo ad esempio lo schema mostrato nella fig. 10a. Azionando il pulsante S1, il contattore Kl riceve l'alimentazione per un tempo di durata molto breve poiché il contatto NC, posto in serie al pulsante, si apre rapidamente togliendo, come si è detto, l'alimentazione a K1.
Vibrazioni e Contatti Ausiliari
24 VAC F1 3 13 24 VAC F1 3 13 S1 K1. S1 K1\ JA1 13 JA1 113 FI KI KI A2 13 21 5A2 21 RELE K1 22 22 CORSA TOTALE CORSA TOTALE RELE RELE DISECCITATO 13 CORSA Inm A1 CONTATTO CHIUSO CONTATTO APERTO A1 K1 K1 A2 A2 0 0 a b Fig. 10 - Esempi di circuiti dal funzionamento incerto L'impulso può tuttavia essere sufficiente a consentire la chiusura del contatto NO e a far sì che la bobina si autoalimenti. In caso contrario, la parte mobile del contattore viene attratta per un attimo e quindi ritorna, per effetto della molla di rimando, nella posizione di riposo. Una tale condizione di funzionamento si ripete fino a quando si tiene premuto il pulsante S1. Se, invece, il contatto NC di K1 viene inserito direttamente sulla bobina come rappresentato nello schema di fig. 10b, premendo il pulsante S1 il contattore non si può autoalimentare. Si manifesterebbero quindi inevitabili vibrazioni della parte mobile del nucleo del contattore. Si noti che, utilizzando i contatti ausiliari normali, il contatto NC di K1 si apre prima che si chiuda il rispettivo contatto NO.
Esempi di Circuiti con Funzionamento Incerto
24 VAC F1 1 24 V AC F1 13 13 3 S1 K1 K2 S1 2 14 14 4 3 13 13 KI 12 S2 K1 K2 K1 2 PELE ECCITATO RELE BOC ITATO 14 14 22 21 21 CO RGA TO TALE CORSA TO TALE K2 K1\ ___ + 1 22 22 13 13 ROADEL A1 A1 A1 CONTATTO CHIUSO APERTO K1 K2 K1 K2 A2 A2 A2 A2 0 0 a b Fig. 11 - Esempi di circuiti dal funzionamento incerto 5 4 14 4 14 RELE ECCITATO ECCITATO K1 DISECCITATO 13 21 CORSA [mm] CONTATTO CHIUSO CONTATTO APERTO 21 5 14 4 7 PELE DISE CITATO RELE DIE CITATO CORCADAm]
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
