Cinematica e Statica dell'elemento Trave, Università Telematica Pegaso
Slide dall'Università Telematica Pegaso su Cinematica e Statica dell'elemento Trave. Il Pdf, pensato per un pubblico universitario di Fisica, esplora la geometria della trave, le ipotesi cinematiche e il comportamento dei materiali, come indicato nell'abstract e nell'outline.
Mostra di più22 pagine


Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
Cinematica e Statica dell'elemento Trave
Geometria della trave
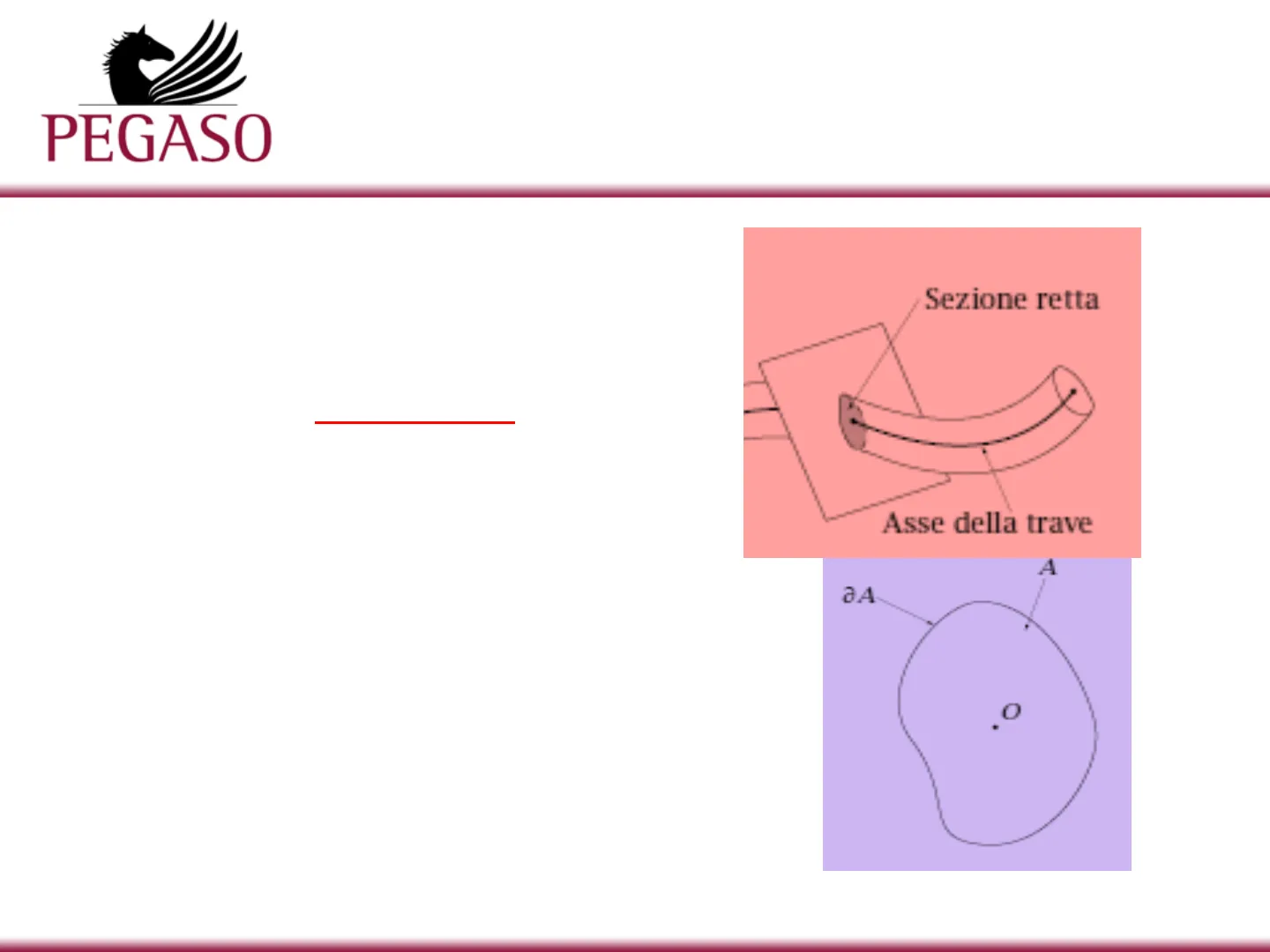
Una trave e geometricamente un solido monodimensionale descritto da una linea media z, detta asse della trave, e dalle sezioni rette associate ai punti della linea d'asse. A sua volta una sezione retta A è un'area piana limitata, in generale a connessione multipla, avente quale contorno dA una o più linee chiuse.
Sezione retta Asse della trave
Definizione di trave
Una trave può anche essere definita quale solido generato da una figura piana, vincolata ad essere perpendicolare ad una data linea, che si muove nello spazio lungo la linea stessa variando, in generale, di forma e di dimensioni.
Elementi fondamentali del modello
Elementi fondamentali del modello sono la linea d'asse, le sezioni rette e i loro punti posti sulla linea d'asse (diversi istanti di Tempo) ed il suo punto vincolato alla linea, e la legge di variazione nel tempo della figura piana e il suo moto.
Un generico punto O della linea d'asse della trave può essere individuato da un'ascissa curvilinea s. Inoltre, ancora nel punto O, la direzione z ortogonale alla sezione retta, e quindi tangente alla linea d'asse, individua un sistema di riferimento cartesiano ortogonale locale Oxyz, con x e y ortogonali A tale sistema di riferimento è associata una base ortonormale locale ex ey e2.
5 0
Attendibilità del modello di trave
L'attendibilità del modello di trave dipende dal rapporto l/h tra la lunghezza della linea d'asse e una dimensione H delle sezioni rette. A parità di forma della sezione, più tale rapporto è grande e più la trave è snella, viceversa più tale rapporto è piccolo e più la trave è tozza. Per travi tozze il modello monodimensionale non è più valido
Ipotesi cinematiche
Le azioni esterne agenti su un corpo generico, e quindi anche su una trave, avranno l'effetto sia di provocarne il moto, almeno nel caso in cui non siano opportunamente contrastate, che di variarne la forma, ovverossia di deformarlo. Le deformazioni potranno essere più o meno pronunciate in dipendenza sia delle proprietà dei materiali componenti il corpo che dell'entità delle azioni stesse, ma rappresentano una conseguenza inevitabile se il corpo viene sollecitato. Comunque molti materiali hanno la proprietà di essere notevolmente rigidi, cioé di deformarsi poco anche in presenza di sollecitazioni notevoli.
Meccanica del corpo rigido
Questo consente di utilizzare la meccanica del corpo rigido per descrivere il moto di un corpo, oppure del suo equilibrio in presenza di vincoli
Campi di spostamento
La cinematica di una trave è descritta con una configurazione di riferimento, individuata dalla sua linea d'asse /. e dalle sezioni rette Ao . La configurazione deformata della trave sarà caratterizzata da una linea d'asse / e dalle associate sezioni rette A deformate. Il modello monodimensionale di semplificazione è caratterizzato del fatto che tutte le funzioni che Intervengono dovranno essere definite solo sui punti della linea d'asse di riferimento.
Ag 0 b Po A 0
Spostamenti e sezioni rette
Così posto il problema, le sezioni rette sono funzioni della sola configurazione di riferimento
Ag 00 Po u lo
La trave deformata è ancora un solido monodimensionale e come tale descrivibile geometricamente da una linea d'asse e da delle sezioni rette associate, che però in generale non corrispondono, alle sezioni rette della configurazione di riferimento.
Modelli cinematici
Trave rigida
Il modello di corpo rigido prescinde dalla deformazione che la trave sviluppa quando soggetta ad azioni esterne. La trave subisce al più un moto rigido e il campo di spostamenti complessivo è quello di un moto rigido. Le sezioni rette subiscono lo stesso moto rigido della trave e quindi i parametri del moto rigido sono le funzioni costanti lungo la linea d'asse, da cui dipendono i campi di spostamento delle singole sezioni rette.
Sezione indeformata
Il modo più semplice di descrivere il campo degli spostamenti di una trave deformabile e quello di richiedere che le sezioni rette restino indeformate. Il campo degli spostamenti e le deformazioni della trave dipendono dagli spostamenti rigidi delle sezioni rette. Le funzioni da cui dipendono i campi di spostamento delle singole sezioni rette sono i parametri del moto rigido delle sezioni che, a differenza del caso della trave rigida, sono variabili in generale lungo la linea d'asse.
Ipotesi di sezione indeformata
Perché la sezione retta sia indeformata equivale alle due seguenti ipotesi: 1. Le sezioni rette si conservano piane 2. Le sezioni rette si conservano indeformate nel proprio piano
Il modello di trave inflessa, che sarà oggetto di studio, così come il modello alla base della teoria tecnica della trave utilizzano l'ipotesi di sezione indeformata
Trave inflessa (Eulero-Bernoulli)
L'ipotesi di sezione retta indeformata ha, nel modello di trave inflessa, il ruolo di approssimare il campo di spostamenti reali, ed anche di semplificare il modello matematico rappresentativo della trave stessa. Si afferma che nel problema di De Saint-Venant, la cui soluzione è ottenuta nell'ambito del modello di corpo solido e quindi senza alcuna restrizione cinematica, la sezione si deforma nel proprio piano e si ingobba fuori di esso In alcuni casi semplici di tale problema, la sezione si conserva piana pur continuando a deformarsi nel proprio piano.
Teoria delle travi (De Saint-Venant)
Per questa teoria l'implementazione del modello si ottiene attraverso una estensione della soluzione del problema di Eulero Bernoulli , per cui il moto rigido delle sezioni rette delle travi si riduce ad un moto rigido medio della sezione, sezione che, come detto, può in generale sia deformarsi nel proprio piano che fuori di questo.
Sezione indeformata nel proprio piano
Vi sono casi in cui l'ipotesi cinematica di indeformabilità delle sezioni rette è troppo restrittiva e necessita quindi di essere superata. Tra questi per es. il problema della torsione di travi a sezione sottile ed aperta. In tal caso, agli spostamenti dovuti al moto rigido della sezione retta viene sommato un campo di spostamenti ortogonale alla sezione stessa che la ingobbano, pur conservandola indeformata nel proprio piano. Il campo di spostamenti ortogonale alla sezione viene ottenuto moltiplicando una funzione definita sulla linea d'asse, costituente una delle incognite del problema, con una funzione definita sulla sezione retta, detta funzione di ingobbamento e dipendente solo dalla forma geometrica della sezione stessa (teoria di Vlasov)
Piccoli spostamenti e piccole deformazioni
Corpi solidi reali
Si è detto in precedenza che i corpi solidi reali si deformano poco anche se soggetti ad azioni esterne notevoli. Va chiarito però che: Diminuendo opportunamente l'entità delle azioni esterne si può sempre fare in modo che le deformazioni siano sufficientemente piccole. La chiave è nella espressione di azioni esterne notevoli, che indicano azioni non inferiori a quelle a cui il corpo si trova normalmente ad essere soggetto. In altri termini, per parlare di piccole deformazioni queste devono essere dovute agli effettivi carichi normalmente agenti.
Spostamenti rigidi
Se un corpo solido reale è vincolato in modo tale da non poter subire degli spostamenti rigidi, le deformazioni e gli spostamenti che conseguono all'applicazione delle azioni esterne effettive sono spesso di piccola entità. Se il corpo, non opportunamente vincolato, può subire degli spostamenti rigidi di notevole entità, con le deformazioni che continuano ad essere di piccola entità, questo non può dirsi per gli spostamenti. E' in tal caso possibile ottenere un campo di spostamenti di piccola entità se agli spostamenti complessivi vengono tolti i contributi di un campo di spostamenti rigidi.
Semplificazione dei problemi di meccanica
Una notevole semplificazione dei problemi di meccanica dei solidi, e quindi di meccanica della trave, si ottiene ponendo alla base dello studio l'ipotesi di piccoli spostamenti e piccole deformazioni, intendendo per spostamenti Spostamenti a meno di un opportuno campo di spostamenti rigidi
Fune Lezione
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
