Sensores electrónicos: funcionamiento, tipos y aplicaciones en vehículos
Diapositivas de Euss School Of Engineering sobre sensores electrónicos, su funcionamiento y tipos. El Pdf, un documento de Tecnología para Universidad, detalla los sensores de posición magnetostáticos, incluyendo los de efecto Hall, con esquemas y diagramas explicativos para una mejor comprensión.
Ver más51 páginas


Visualiza gratis el PDF completo
Regístrate para acceder al documento completo y transformarlo con la IA.
Vista previa
Sensors
Sessió 5. Sensors. Electrònica del Vehicle euss e School of Engineeringeuss e School of Engineering
Definició de Sensor Electrònic
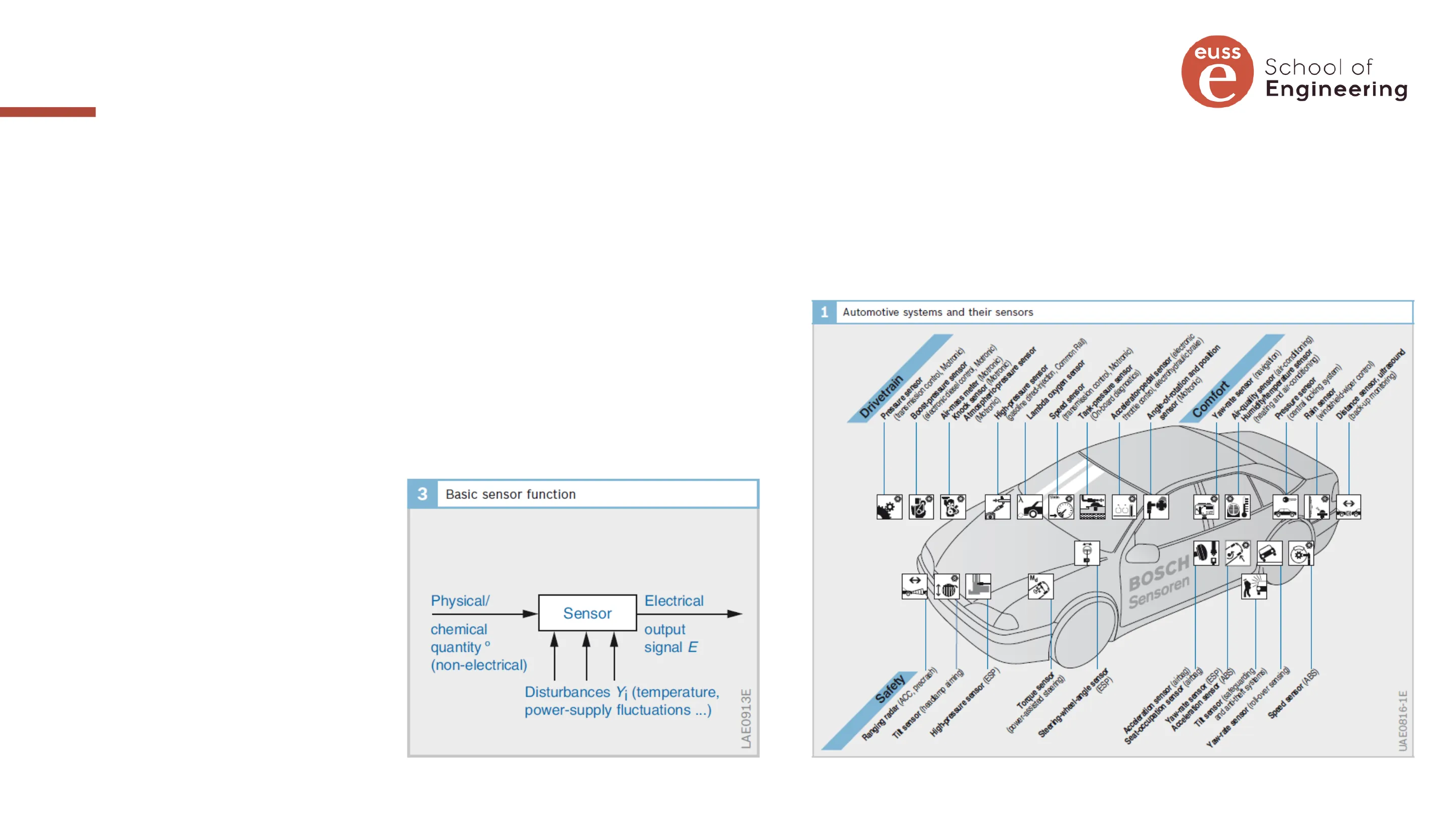
DEFINICIÓ. Sensor electronic: Dispositiu que transforma una variable física o química (generalment no electrica) F en una variable electrica E. Les sortides del sensor electric no nomes es proporcionen en forma de corrent i tensio, sino que també estan disponibles com a amplituds de corrent o tensio, frequencia, fases, amplades d'impuls i cicles o períodes d'una oscil·lació electrica, o com a parametres electrics, resistencia, capacitat i inductancia. Un sensor es pot definir mitjançant l'equació següent: E = f (F, Y1, Y2 ... ) Si es coneix la funció f, aleshores es pot calcular matematicament la variable mesurada buscada a partir del senyal de sortida E i les variables d'influencia Yi La figura 1 ofereix una visió general de l'abundancia de sistemes electronics de vehicles que ja hi ha al mercat. S5. Sensors. 3 Basic sensor function Physical/ Electrical Sensor chemical quantity º (non-electrical) output signal E Disturbances Yi (temperature, power-supply fluctuations ... ) LAE0913E 1
Sistemes Automobilístics i els seus Sensors
Sistemes de Propulsió
Automotive systems and their sensors Drivetrain Pressure sensor Boost-pressure sensor (electronic diesel control, Motronic) Air-mass meter (Motronic) Knock sensor (Motronic) High-pressure sensor Lambda oxygen sensor (transmission control, Motronic) Accelerator-pedal sensor (electronic throttle control, electrohydraulic brake) Angle-of-rotation and position Yaw-rate sensor (navigafon) Air-quality sensor (air-conditioning) Humidity/temperature sensor (heating and air-conditioning) (central locking system) Rain sensor (windshield-wiper control) (back-up monitoring) Safety Ranging radar (ACC, precrash) Til sensor (headlamp aiming) High-pressure sensor (ESP) (power-assisted steering) Steering-wheel-angle sensor (ESP) Acceleration sensor (airbag) Seat-occupation sensor (airbag) Yaw-rate sensor (ESP) Acceleration sensor (ABS) Til sensor (safeguarding and anti-theft systems) Y aw-rate sensor (roll-over sensing Speed sensor (ABS) UAE0816-1E Distance sensor, ultrasound O O M BOSCH Sensoren Torque sensor Speed sensor Tank-pressure sensor (On-board diagnostics) sensor (Motronic) Comfort Pressure sensor (Motronic) Atmospheric-pressure sensor (gasoline direct-injection, Common Rail) (transmission control, Motronic)euss e School of Engineering
Criteris de Selecció de Sensors
Criteris Funcionals i de Seguretat
CRITERIS DE SELECCIÓ(I) Segons el tipus d'aplicació: . Funcionals (ex: sensor de pressió). Per a funcions de control amb llac obert o tancat. · Seguretat (protecció de passatgers: airbag, ABS) i protecció (antirobatoris) · Monitorització del vehicle i informació al conductor (ex: consum). 11
Tipus de Corbes Característiques
Characteristic curve types a b S S X X C d S S X X UAE0286-1Y Segons la corba característica: . Continua i lineal (fig. 11a). S'utilitzen principalment per a tasques de control que cobreixen un ampli rang de mesura. · Continua i no lineal (Fig. 11b) S'utilitzen per al control de Ilaç tancat d'una variable mesurada en un rang de mesura molt restringit (per exemple, control dels gasos d'escapament). ▪ Discontinua multinivell (Fig. 11c). · Discontinua dos nivells amb histeresi (Fig. 11d). S'utilitzen per a la monitorització del valor limit en casos en que les mesures correctives son facils d'aplicar quan s'assoleixen els limits. Fig. 11 S Output signal X Measured variable a Continuous, linear b Continuous, nonlinear C Discontinuous, multi-step d Discontinuous, two-step (with hysteresis) S5. Sensors.euss e School of Engineering
Criteris de Selecció (II): Tipus de Senyal
Senyals Analògics i Digitals
CRITERIS DE SELECCIÓ(II) Segons el tipus de senyal a la sortida: - Analògics o continus: . Corrent o tensió. · Freqüència o període. . Duració o amplada de pols. - Digitals o discrets: · Dos nivells (codificació binària). . Multinivell equiespaiat (codificació d'un senyal analogic o digital). · Multinivell no equiespaiat (codificació d'un senyal analògic). Cal fer una altra distinció (Fig. 12) pel que fa a si el senyal esta disponible permanentment a la sortida del sensor (continuament) o només a intervals discrets ( discontinu). S5. Sensors. 12
Classificació de Senyals Determinats
Classification of the determined signals according to the information parameter (IP) with examples Infinite range Deterministic signal Finite range discrete analog Multiple signals Digital signals Two-point signals (binary signals) Three-point signals (ternary signals) Remaining multiple signals Constant quantific- ation level conti- nuous 1 disconti- nuous 2 conti- nuous 3 disconti- nuous conti- nuous disconti- nuous 5 conti- nuous 6 disconti- nuous 7 disconti- nuous 4 8 1 2 3 4 L Time t- Time t- Time t- Time t- 5 6 7 IP IP Clock1 Clock2 Clock3 L 0 -L Time t- Time t- Time t- Time t- UAE 1047E IP IP IP IP L 0 0 IP IP 8 Peuss e School of Engineering
Requeriments Principals dels Sensors
Condicions de Treball i Fiabilitat
REQUERIMENTS PRINCIPALS - Condicions de treball: ▪ Tensions mecaniques (vibracions, impactes). . Influencies climatiques (temperatura, humitat). · Influències químiques (olis, benzina, electròlit de la bateria, sals). . Influencies electromagnetiques (interferències d'altra frequencia - Fiabilitat. Tres nivells o classes: · Direcció, frens, protecció als passatgers Motor, transmissió, suspensió, pneumatics. · Confort, informació, diagnosi, protecció antirobatori. - Mida. Nivell d'integració. - Cost de fabricació. - Exactitud. S5. Sensors. Fig. 30
Nivells d'Integració dels Sensors
SE Sensors SA Signal conditioning A/D Analog-Digital converter ECU Control unit MC Microcontroller BS Bus interface 30 Sensor integration levels Sensor(s) Transmission path Control unit Without electronics SE SA ECU (analog) Resistant to interference A ECU tap-off (analog) Immune to interference 2nd Integration level SE SA BS BS ECU D patible (digital) Immune to interference 3rd Integration level SE SA MC BS ECU patible (digital) UAE0037-3E A/ D Multiple 1st Integration level SE SA D Bus-com- A Bus-com- A D Susceptible to interferenceeuss e School of Engineering
Sensors de Posició Lineal i Angular
Variables Mesurades
SENSORS DE POSICIÓ LINEAR I ANGULAR Mesura desplaçaments linear o posicions angulars. Exemples de variables mesurades: ▪ Posició del pedal de l'accelerador. · Posició de la valvula de l'accelerador. · Nivell de liquid al diposit de combustible. · Angle de gir del volant de la direcció. . Posició del selector de la caixa de canvi. · Posició del seient. . Posició dels miralls retrovisors. · Recorregut de la unitat servo de l'embragatge. · Posició del pedal de fre. · Angle d'inclinació 1
Rang de Mesura de Posicions
Travel/angular positions as direct measured variables Measured variable Measuring range Throttle-valve position in the 90° gasoline engine Accelerator/brake-pedal position 30° Seat, headlamp, rear-view mirror position Control-rack travel and position for 21 mm diesel in-line fuel-injection pump Angular setting of the injected 60° fuel-quantity actuator on the diesel distributor-type injection pump Fill level in the fuel tank 20 to 50 cm Travel of clutch servo unit 50 mm Distance: vehicle - vehicle or 150 m vehicle - obstacle Steering (wheel) angle ±2.360º (±2 revolutions) Tilt angle 15° Angle of direction of travel 360º GPS (Global Positioning System) 360° geographical latitude/longitude, geographical altitude Near-range distance 1.5 m (US parking-aid assistant) Near-range radar (precrash) 10 m External video 40 m Long-range and near-range 100 m infrared viewer S5. Sensors.euss e School of Engineering
Sensors de Posició: Potenciomètrics (I)
Principi de Funcionament
SENSORS DE POSICIÓ: SENSORS POTENCIMÈTRICS (I). Principi de funcionament: · dispositiu electromecanic que consta d'una resistencia de valor fix sobre la que es desplaça un contacte lliscant (el cursor), que la divideix electricament. . El desplaçament es mesura a partir de la relació proporcional entre la posició del cursor i el valor de la resistencia. (1) o K R2 R = R1+R2 cursor 0 (3) R (2) o Cursor Junta estanca i coixinet Eix 1
Avantatges i Inconvenients
Principle of the wiper potentiometer OU QUA Rs 2 Pmax LA 3 1 IA Wiper current Uo Supply voltage UA Measurement voltage R Resistance Ymax Maximum angle of rotation 9 Measured angle Avantatges: ▪ Preu economic. . Circuit de condicionament simple. . Ampli marge de tensio a la sortida. . Ampli rang de temperatura de treball. . Alt nivell d'exactitud. Inconvenients: · Vida útil limitada pel desgast mecanic. . Errors deguts a la inercia i fregament. · Dificultat de miniaturització. S5. Sensors. Element resistiu Carcassa Element resistiu Cursor Carcassa Zona morta Junta estanca i coixinet Eix de gir KRV2 - UAE0289-1Y Fig. 1 1 Wiper 2 Resistance track 3 Contact conductor track Reuss e School of Engineering
Sensors de Posició: Potenciomètrics (II)
Aplicacions del Sensor de Papallona
SENSORS DE POSICIÓ: SENSORS POTENCIMÈTRICS (II). APLICACIONS. Sensor de la valvula de la papallona de l'accelerador: 3 Throttle-valve sensor (design) 123 4 2cm O 0 5 UMK 1306Y Fig. 3 1 Throttle-valve shaft 2 Resistance track 1 3 Resistance track 2 4 Wiper arm with wipers 5 Electrical connection Fig. 5 1 Throttle valve 2 Throttle-valve sensor UA Measurement voltages Uv Operating voltage R1, R2 Resistance tracks 1 and 2 R3, R2 Calibration resistors R5, R6 Protective resistors 5 Throttle-valve sensor (circuit) R R3 R 2 R6 0+ VAI UAZ UMK1307-2Y
Sensor de Nivell de Combustible
Sensor de nivell de combustible: Fig. 2 1 Electrical connections 2 Wiper spring 3 Contact rivet 4 Resistor board 5 Bearing pin 6 Twin contact 7 Float lever 8 Float 9 Fuel-tank floor 7 C 8 UMK1790Y S5. Sensors. 2 Potentiometric fuel-level sensor (design) 5 2 3 6 4euss e School of Engineering
Sensors de Posició: Inductius (I)
Principi de Funcionament
SENSORS DE POSICIÓ: SENSORS INDUCTIUS (I). Principi de funcionament: ▪ Basat en les corrents de Focault o d'Eddy (Eddy- Current Lilled Oscillator - ECKO). · Quan s'aproxima un objecte metàl.lic a una bobina alimentada amb un corrent d'alterna, apareixen corrents de Focault (Eddy Currents) sobre el material conductor, que causen un camp magnetic que s'oposa al camp magnetic que les produeix. La magnitud d'aquest camp magnetic depen de la mida i material de l'objecte metallic i de la distancia entre el sensor i l'objecte. . Com a consequència, es produeix un canvi en la inductancia i en la resistencia del sensor. · La mesura del canvi de la inductancia o de la resistencia es converteix en un senyal electric mitjançant un oscil lador d'amplitud o frequencia variable. C / BOBINA L 00000 f -OBJECTE METAL.LIC 00000 x - SORTIDA O + O REF RECTIFICADOR DE PRECISIÓ COMPARADOR VLA Objecte absent Objecte present SORTIDA REF 9 SENSOR CABLE DE CONEXIÓ S5. Sensors.
¿Non has encontrado lo que buscabas?
Explora otros temas en la Algor library o crea directamente tus materiales con la IA.
