Progettazione e compensazione di reti topografiche planimetriche
Documento da Università su progettazione e compensazione di reti topografiche. Il Pdf esplora la progettazione e compensazione di reti topografiche, con particolare attenzione alle reti planimetriche, e include sezioni sulla compensazione a minimi vincoli e l'analisi delle matrici di varianza-covarianza, utile per studenti universitari di Informatica.
Mostra di più8 pagine


Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
Progettazione di Reti Topografiche
la classe di strumentazione prevista per il rilievo. Queste considerazioni sono alla base del problema della progettazione di reti, della loro geometria e sulle misure da fare. Il procedimento è il seguente:
- dai vertici della rete (tramite valori approssimati delle coordinate) ed in base alle osservazioni previste si costruisce la matrice dei coefficienti A;
- in base alle misure da effettuare ed alla strumentazione che si intende utilizzare si costruisce la matrice dei pesi P.
Con questi elementi si può calcolare la matrice di varianza-covarianza e quindi prevedere i valori delle ellissi d'errore che scaturiscono dalle misure C= o2(AT PA)-1 Andrebbe utilizzato il valore della varianza dell'unità di peso a posteriori che però si calcola dai residui (ovviamente non disponibili). Si può utilizzare quindi una stima a priori in base agli errori che si pensa di commettere.
5.3 La progettazione di reti planimetriche
La progettazione di una rete segue sempre le fasi che vengono di seguito citate: Scelta del sistema di riferimento In genere si verifica sul sito del rilievo l'esistenza o meno di punti già noti e facenti parte di altre reti trigonometriche (di vario ordine), altimetriche o GPS. E' il caso di rilievi da inserire in un rilievo preesistente (ad es. raffittimento, riattacchi ecc.). Se invece il rilievo è fine a se stesso la scelta del sistema di riferimento viene fatta anche in base agli scopi per cui lo stesso deve essere effettuato. Nel caso di una rete per lo studio di movimenti o deformazioni si potranno scegliere, come riferimento, alcuni punti stabili (ovvero non soggetti ai movimenti che sono in esame) o perlomeno dal comportamento noto. In fase di progettazione è anche possibile assumere un sistema di riferimento baricentrico che consente di limitare l'effetto della propagazione degli errori dal punto o dai punti assunti come emanazione della rete. Infatti tali errori si sommano allontanandosi dall'origine del sistema a causa dell'accumulo (propagazione) degli errori stessi lungo la rete. Tale considerazione consiglia una simulazione della rete in un sistema baricentrico e, successivamente, il suo inserimento in una rete preesistente attraverso l'uso dei punti noti. Disegno della rete e tipologia di misure da eseguire Questo è il punto più importante di tutta la progettazione da cui dipenderanno i risultati ed i costi della rete stessa. Per quanto attiene alla forma generale della rete essa è evidentemente condizionata dallo scopo del rilievo e dalla morfologia del terreno (che per esempio inciderà sulla intervisibilità tra punti che devono essere collimati). In generale si deve puntare ad una forma compatta dalle geometrie regolari. La maglia risultate della rete dovrà essere possibilmente di tipo triangolare con forme il più equilatere possibili. Se si misurano solo delle distanze tale schema cade in difetto perché fornisce poche osservazioni sovrabbondanti e si deve quindi fare ricorso a schemi più complessi. Visto che il numero minimo di osservazioni necessario per risolvere una rete di n punti è di 2n-3, va prevista una certa ridondanza delle osservazioni per compensare le misure in modo efficace. Dette N le misure effettuate la ridondanza dovrà essere quantificata on modo che 111N ≥ 1,5+2 (55 2n-3 Considerato che lo strumento utilizzato è quasi sempre la stazione totale (per il momento escludiamo l'utilizzo del GPS), le misure sono normalmente miste ed è bene che queste forniscano lo stesso contributo all'errore finale attraverso misure di accuratezza comparabile. Infatti per reti a lati piccolissimi (centinaia di metri) convengono le misure angolari mentre per lati più lunghi convengono le distanze che però possono essere limitate dalla portata dello strumento. Occorre sempre fare attenzione al peso da assegnare alle misure per in modo da "nobilitare" le osservazioni migliori. Ricordiamo che la matrice di varianza-covarianza, a meno di un fattore costante o2, dipende solo dalle coordinate dei punti ed è su di esse che si può lavorare nella fase di simulazione. Si può procedere in diversi modi:
- se si vuole vedere l'andamento (dimensione relativa) delle ellissi d'errore e non la loro grandezza si può prescindere dagli errori delle misure ma considerare solamente il tipo di misura e le coordinate approssimate dei punti ottenendo delle equazioni lineari note in base alla matrice di varianza-covarianza (AT A)-1. Ciò è possibile solo se le misure sono della stessa specie;
- se si hanno misure di tipo diverso occorre introdurre una stima degli errori che si pensa di commettere per potere determinare i pesi delle diverse equazioni di osservazione e la matrice di varianza-covarianza sarà del tipo (AT PA)-1. Se gli errori preventivati sono corretti questa fornisce anche la dimensione delle ellissi di errore.
Cambiamento della forma, aggiunta di punti o di misure
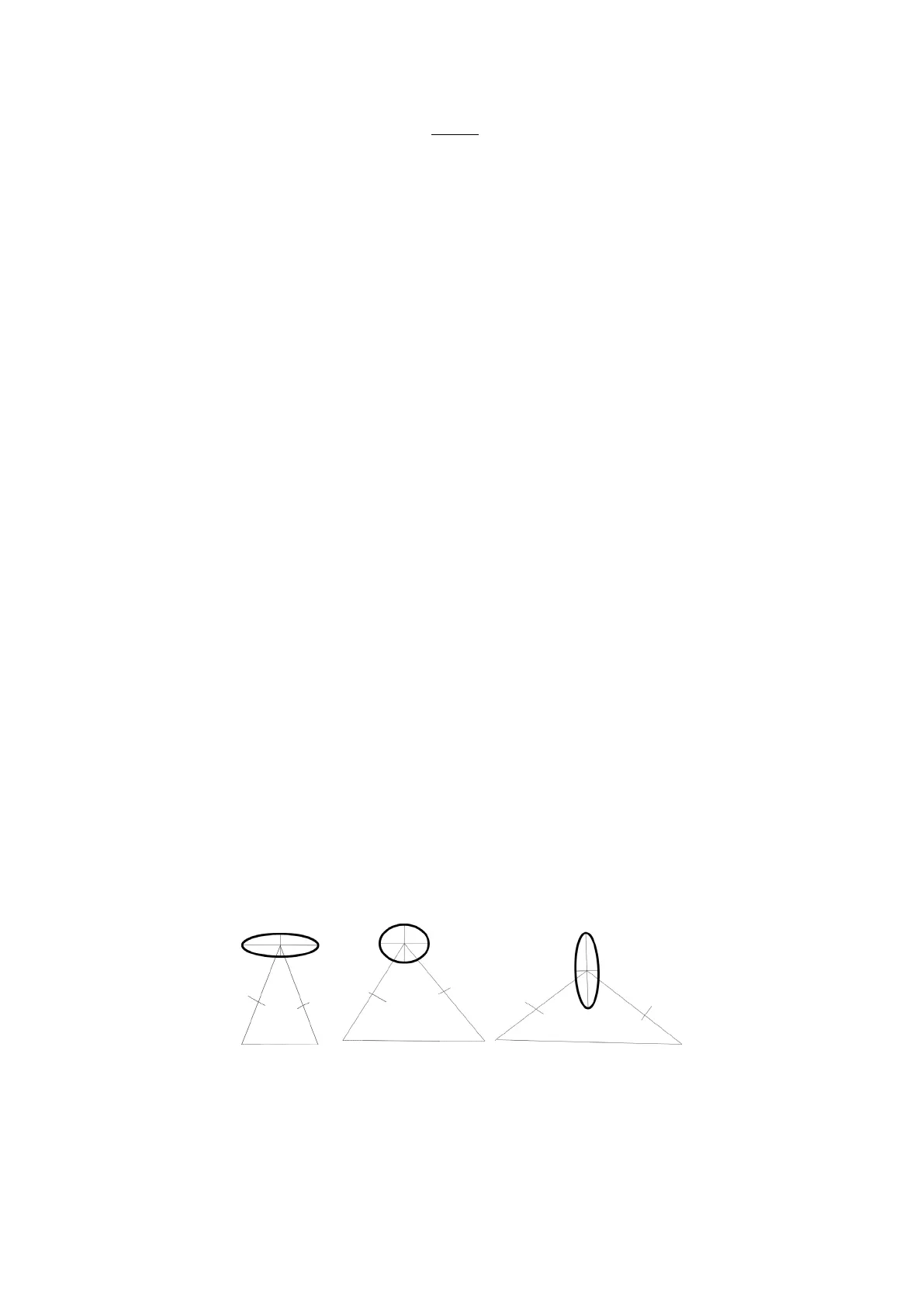
Se il risultato della simulazione non è soddisfacente si può tentare di migliorare la precisione modificando la forma della rete, aggiungendo altri punti alla geometria di rete oppure aggiungendo misure di tipo diverso. Il tutto cercando di mantenere un buon compromesso con i costi del rilievo. Durante questa fase si deve anche cercare di ottimizzare il lavoro da svolgere sul campo, cercando, ad esempio, di contenere i costi relativi al personale ed alla logistica in generale. Vediamo alcuni esempi molto schematici che illustrano la dipendenza tra misure disponibili ed errori attesi (sotto forma di ellissi di errore).
Effetto della geometria nelle misure di distanza
Effetto della geometria nelle misure angolari
1121 Effetto dell'aggiunta di misure angolari Modifica della geometria con aggiunta di misure da altri punti Modifica della matrice dei pesi 01 = 02 -> Pi = P2 oppure 01 > 02 -> P1 < P2
Valutazione della varianza e covarianza con misure strettamente necessarie
Il metodo delle osservazioni indirette può essere applicato alla risoluzione della rete o del semplice rilievo (vedi intersezione in avanti con misura di due angoli) anche quando le misure eseguite sono strettamente necessarie. In questi casi, ovviamente, non dovendo compensare le misure, si può arrivare alla risoluzione del problema anche applicando le formule trigonometriche. Tuttavia le osservazioni indirette possono essere utili in quanto consentono di calcolare la matrice di varianza-covarianza, procedura che risulta più semplice ed immediata della applicazione della propagazione pitagorica della varianza, la quale può coinvolgere funzioni che possono essere difficili da differenziare. Si possono quindi utilizzare i soliti programmi di calcolo matriciale ad un problema dove m=n (osservazioni=incognite). Occorrerà conoscere la varianza delle singole misure, ottenibili in base alle 113caratteristiche della strumentazione utilizzata o dalla statistica applicata alle ripetizioni di una singola misura. Essendo il numero delle equazioni uguale al numero delle incognite, il sistema che lega le misure alle grandezze da determinare sarà: Ax-1=0 A(mxm); x(mx1); L(mx1) con soluzione x = A-11 . Attraverso la legge di trasformazione della matrice di varianza-covarianza applicata agli errori associati alle osservazioni, si possono ottenere gli errori associati alle stime. Occorre conoscere gli errori delle singole misure 01,02, ... .. La matrice sarà data da K =Ao2 (A-1)" con σί = 03 σ (56 m Proviamo a risolvere l'esercizio, già visto, di intersezione in avanti con misure strettamente necessarie applicando il metodo delle osservazioni indirette. Y a b ΘΑΡ ₿ 0AB B α c A X Le coordinate dei punti noti valgono y A = 500m x = 500m XR =1500m yB =1000m mentre gli angoli misurati sono i seguenti a= 33º28'14" = 33º,47055556 = 0.584171r ₿ = 87°18'37" = 87º,31027778 = 1.523851r Si cercano le coordinate del punto incognito P avendo delle misure angolari con accuratezza di 5". Scriviamo le 2 equazioni alle osservazioni relative generate dalle misure di a e ß OAB -O AP =|arctg Xb - Xa YA -Ya x .)-la OBP - OBA = arctg Xp-Xb Y -YB arctg Xp - Xa Y-Ya = O mis + 2x - arctg Xa -Xb Y -Yb + T = P mis Prima di linearizzare occorre trovare delle coordinate a priori per il punto P. Forniamo un valore approssimato (che potrebbe essere letto da una cartografia a scala idonea) 114 -2 2 σ 2 270 = 1148,00m Y0 = 1626,00m Prendiamo le due equazioni già linearizzate per gli angoli a e B. La linearizzazione avviene differenziando rispetto alle incognite xp ed y p . Si ottengono le seguenti equazioni lineari p pa ) 2 YO - Ya (do x + p (d°)2 Y0 - Yb pb x p p XO - Xb p (d°.)2 pb) p (d° )2 XO - Xa pa) yp = (a mis - a0) yp = (Bmis - Bº) che compaiono nella forma Ax =b. Non compaiono i residui dovendo essere le equazioni pienamente soddisfatte dalle incognite. I valori aº, Bº sono i valori determinati sostituendo le coordinate note e quelle approssimate nel legame funzionale a = |arctg Xb - Xa YB -Ya 2 )-(a Xp - Xa Y -Ya - .+2x - arctg 87°,2159893 = 1,522206r Xa - Xb Y -Yb = 33°,5150189 = 0,5849474 r = + Le distanze tra i vari punti si possono calcolare sempre a partire dai valori approssimati d pa =(x)-Xa)+(x) -Ya) = 129,1458 m d pb =1(x)-Xh)2 +(Y) -Y))2 =718,1782 m Le matrici coinvolte nel calcolo sono solo le seguenti MATRICE DEI COEFFICIENTI: avrà dimensione m (righe, ovvero osservazioni) x n (colonne, ovvero incognite) ed è rappresentata dai termini racchiuse nelle parentesi quadre. La matrice A (2x2) sarà la seguente A = - 6,700 . 10-4 1,214.10-3 6,825. 10-4 3,840 . 10-4 VETTORE DELLE INCOGNITE: avrà dimensione n (righe, ovvero incognite) x 1 e rappresenta le incognite del problema. Il vettore x (2x1) sarà x= Xp y p VETTORE DELLE DISCREPANZE: avrà dimensione m (righe, ovvero una per ogni osservazione) x 1. Il vettore (2x1) sarà b= -7,764.10-4 1,645.10-3 115 Bº = |arctg Xp-Xb Yp - Yb −Troviamo la soluzione x = A-1 b = 1,26 0,18 (metri) Visto che xp = Xp - X0 e yp = Yp - Y0 si ricavano i valori delle incognite compensate che saranno Xp =X0 +xp =1148,00 +1,26 = 1149,26m Yp = Y) + y p = 1626,00 + 0,18 = 1626,18m La soluzione differisce leggermente da quella trovata nel caso dell'intersezione semplice a causa delle approssimazioni nei valori adottati per gli angoli misurati e a-priori. Vediamo come si presenta la matrice di varianza-covarianza K =A-1 o2 (A-1)™ supponendo di avere errori delle misure di 5" = 2,42 10-5 rad. 3,840 · 10-4 k = -6,700 - 10-4 1,214.10-3 6,825.10-4 − 1 5,876 . 10-1 (m2) 5,876 . 10-10 1,214.10-3 -6,700· 10-4 3,840.10-4 6,825.10-4 -1 T k = -3,9.10-4 4,2.10-4 -3,9.10-4 1,3.10-3 Non avendo residui non è possibile applicare test statistici per valutare l'affidabilità dei risultati.
5.4 Compensazione a minimi vincoli e a vincoli sovrabbondanti
I calcoli relativi alla compensazione di misure geodetico - topografiche vengono effettuati da appositi software per la topografia che, come si è visto grazie agli esercizi, richiedono le informazioni relative a:
- osservazioni effettuate (misure planimetriche, altimetriche, di distanza o basi GPS);
- pesi da attribuire alle misure;
- elementi noti (coordinate, misure assunte a-priori come vincoli del rilievo);
- elementi incogniti (coordinate dei punti dei quali si conoscono solo valori approssimati).
Nel metodo delle osservazioni indirette ognuna delle osservazioni effettuate consente di scrivere un'equazione che avrà al suo interno sia le incognite e sia gli elementi noti del problema. La compensazione finale fornisce le coordinate incognite, gli errori ad esse associate, dedotti dalla matrice di varianza covarianza, ed il risultato dei test statistici che consentono di rigettare quelle osservazioni che non rientrano nelle tolleranze imposte in quanto affette da possibili errori grossolani. E' molto importante notare che le misure da sole non sono in grado di fornire la soluzione del problema, ovvero le coordinate dei punti o la loro quota. Infatti le equazioni alle osservazioni fanno sempre riferimento a differenze di coordinate o di quote. Queste, da sole, non possono fornire la soluzione cercata a meno che non siano note le coordinate di un certo numero di punti 116
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
