Avviamento dei motori trifase: problemi e soluzioni tecniche
Documento da Università su Avviamento dei Motori Trifase. Il Pdf, di Tecnologia, descrive le tecniche di avviamento dei motori trifase, evidenziando i problemi legati alle correnti di spunto e le soluzioni adottate, come l'uso di reostati e interruttori magnetotermici.
Mostra di più13 pagine

Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
Avviamento dei Motori Trifase
I motori asincroni con rotore a gabbia assorbono allo spunto una corrente che può risultare da quattro a otto volte la corrente nominale di pieno carico, con un forte sfasamento. Ciò provoca grosse perdite per l'effetto Joule e un riscaldamento sensibile del motore. Perciò il motore non può essere avviato troppo spesso senza comprometterne il corretto raffreddamento e, in alcuni cataloghi, viene indicato il numero massimo di avviamenti ammessi in un certo periodo di tempo. È quindi necessario ridurre questo impulso di cor- rente e nel contempo correggere lo sfasamento in modo da aumentare la componente attiva della potenza, ovvero la coppia.
Volendo lavorare alla tensione nominale, per rifa- sare la corrente di spunto e, quindi, aumentare la coppia, bisogna aumentare la resistenza del circuito di rotore.
Avviamento con Rotore Avvolto
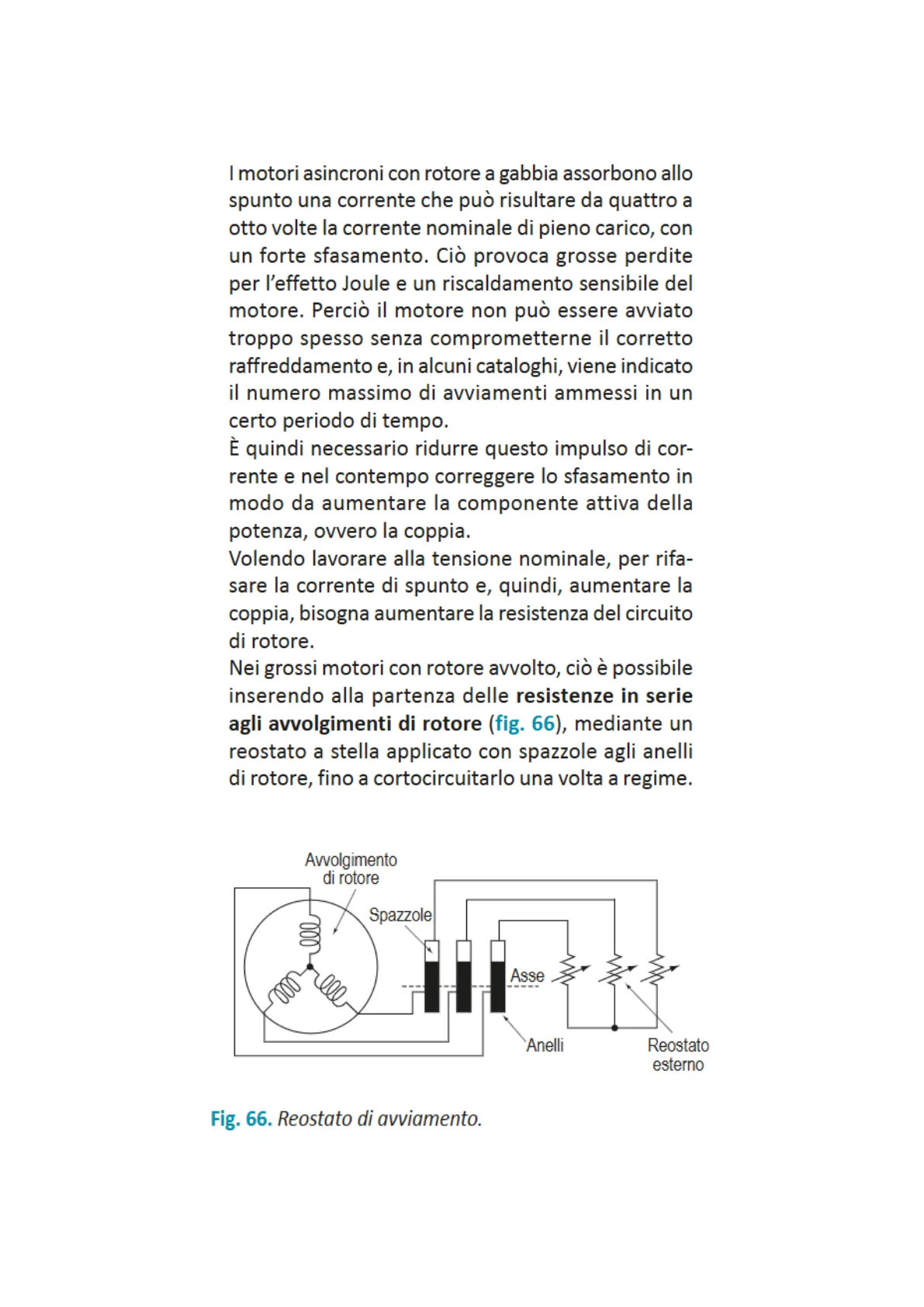
Nei grossi motori con rotore avvolto, ciò è possibile inserendo alla partenza delle resistenze in serie agli avvolgimenti di rotore (fig. 66), mediante un reostato a stella applicato con spazzole agli anelli di rotore, fino a cortocircuitarlo una volta a regime.
Avvolgimento di rotore Spazzole 000 000 000 Asse Anelli Reostato esterno Fig. 66. Reostato di avviamento.Una volta utilizzate, le resistenze rotoriche inserite vanno eliminate, altrimenti il motore finirebbe per lavorare con valori di scorrimento più alti, aumen- tando le perdite nel ferro di rotore, oltre alle perdite nelle resistenze stesse.
Questa modalità di avviamento è utilizzata su mo- tori in funzionamento continuativo, con un limitato numero di avviamenti e arresti.Allo spunto, con il rotore fermo (n = 0), si ha la coppia di avviamento (Ca), detta anche coppia di spunto, e il motore assorbe la sua massima corrente (la). Perché il motore possa partire, il valore della cop- pia di spunto disponibile deve risultare superiore alla coppia resistente (Cr) da trascinare, presente sull'albero.
Una volta che il motore entra in rotazione, dopo un breve calo, la coppia inizia ad aumentare fino a raggiungere il suo valore massimo (CM), per poi andare a zero in corrispondenza della velocità di sincronismo (n = n$). La corrente assorbita, invece, cala continuamente all'aumentare della velocità del rotore, fino ad annullarsi anch'essa (almeno teoricamente) per n = ns.
Avviamento Stella-Triangolo
Un terzo metodo consiste nell'avviare il motore con gli avvolgimenti primari connessi a stella, e quindi con tensione inferiore, per poi portarli in connes- sione a triangolo una volta in rotazione (fig. 69).
L1 L2 L3 PE 1 A U, W2 V1 M U2 3~ V2 Fig. 69. Avviamento stella-triangolo. In connessione a stella, la corrente assorbita dalla linea è un terzo rispetto a quella in connessione a triangolo.
Un avviamento a tensione ridotta riduce quindi la corrente di spunto, ma in egual misura anche la coppia e può quindi essere utilizzato solo in appli- cazioni ad avviamento con carico ridotto o dove volutamente si vuole partire limitando lo strappo iniziale (come nei carri-ponte).
Avviamento con Autotrasformatore Trifase
Un altro avviamento a tensione ridotta impiega un autotrasformatore trifase (fig. 70).
L1 L2 L3 * * * F2 KM3 ₫ KM2 U, V1\ W1 UL v W U2 V2 W2 C d M KM1 3 ~ Il processo avviene in tre fasi: . dapprima il motore viene alimentato con una tensione ridotta dall'autotrasformatore connesso a stella (KM2 e KM1 chiusi); . successivamente KM1 si apre e una frazione di autotrasformatore resta in serie agli avvolgimenti di statore come una reattanza aggiunta; . infine, si chiude KM3 per dare al motore la ten- sione piena.
Dispositivi di Comando e Protezione
Contattori
Nelle applicazioni industriali più semplici, i motori elettrici sono comandati tramite contattori.
I contattori, o teleruttori (fig. 71), come dice il nome, sono dispositivi elettromeccanici di apertura e chiu- sura di contatti di potenza a comando indiretto (non manuale), anche a distanza, predisposti per un no- tevole numero di manovre (milioni).
Sono costituiti da una parte fissa, contenente i mor- setti per il collegamento esterno e la bobina di ecci- tazione, e da una parte mobile costituita da contatti, mantenuta a riposo in posizione stabile mediante l'azione di una molla (fig. 72).
ancora mobile contatto fisso 000 000 contatto mobile bobina di comando nucleo ferromagnetico fisso Fig. 72. Struttura di un contattore. Eccitando la bobina, il nucleo dell'elettromagnete attira l'ancora mobile e i contatti mobili si chiudono su quelli fissi, vincendo la forza antagonista della molla, e chiudendo il circuito tra i morsetti di in- gresso e di uscita.
La chiusura dei contatti dura fintanto che la bobina del contattore rimane in tensione.
Categorie di Impiego dei Contattori
Per tener conto delle diverse condizioni di lavorocui sono predisposti, i contattori vengono classificati per categorie di impiego (tab. 5), dodici in corrente alternata (ACn) e quattro in corrente continua (DCn).
Tab. 5 - Alcune categorie nominali di impiego dei contattori in alternata
| Categoria di utilizzazione | Applicazioni tipiche | Ic/le |
| AC1 | carichi debolmente induttivi; forni a resistenza | 1,5 |
| AC2 | motori ad anelli (avviamento e arresto) | 4 |
| AC3 | motori a gabbia di scoiattolo (avviamento e arresto) | 8 |
| AC4 | motori a gabbia (avviamento, frenatura in controcorrente, inversione e manovra a impulsi) | 10 |
Ciascuna categoria è caratterizzata da un diverso valore delle correnti di spunto e di interruzione am- missibili (Ic) rispetto alla corrente di impiego no- minale (le) del contattore, e determina un proprio ambito applicativo.
La scelta della categoria, quindi, è indispensabile per la compatibilità del dispositivo con il tipo di carico.
Per esempio, un motore a gabbia di scoiattolo pre- senta correnti di spunto che possono risultare da quattro a otto volte la corrente nominale a pieno carico, con un forte angolo di fase; va perciò pilotato con un contattore in categoria AC3.
La corrente di impiego (le) di un contattore è tanto minore quanto più severa è la categoria di utilizzazio- ne e tanto maggiore è la frequenza delle manovre.
Nella scelta del contattore idoneo per una determi- nata applicazione i valori nominali della tensione e della corrente di impiego devono risultare compati- bili con i corrispondenti valori richiesti dal carico, e la tensione della bobina di comando deve essere coe- rente con il valore disponibile per i circuiti ausiliari.
Per i contattori da utilizzare per l'avviamento di un singolo motore, in alternativa alla corrente di im- piego, il costruttore può indicare la massima poten- za nominale del motore funzionante alla tensione nominale.
Relè Termico
Il relè termico è un dispositivo costituito da lamine bimetalliche poste in serie al carico e sensibili alla temperatura prodotta al loro interno per effetto Joule dalla corrente che li percorre, con soglia re- golabile (fig. 73).
CHNT NR2-25 229458 STOP RESET TEST ga NO 97 NC 95 95 Fig. 73. Relè termico (CHNT).Il valore di taratura deve corrispondere al valore nominale della corrente del motore. Superato il limite di taratura, la flessione delle lamine comanda il contattore ad aprire il circuito di alimentazione del carico.
Il relè termico ha una caratteristica di intervento compatibile con l'avviamento del motore, e soli- tamente sopporta una corrente pari a sei volte il valore impostato per 6 s.
Le caratteristiche di intervento sono curve del tipo a tempo inverso, ovvero il tempo di apertura è tanto minore quanto maggiore è la sovracorrente e sono due, una per sovracorrente con partenza da freddo e l'altra con partenza da caldo (fig. 74).
Indicando con IT la soglia di corrente predisposta in fase di taratura del relè, il relè non interviene entro due ore se il sovraccarico è minore del 5% (I ≥ 1,05 . IT), mentre interviene sicuramente entro le due ore se, partendo da un dispositivo già caldo, il sovraccarico risulta maggiore del 20% (I ≥ 1,2 · IT).
Nel caso di fig. 74, con I = 1,2 · IT, il tempo di inter- vento è di 700 s partendo da freddo e 200 s partendo già caldo.
t [s] 10.000 8.000 6.000 4.000 2.000 1.500 1.000 800 600 400 200 100 80 60 40 20 Trifase a freddo 10 8 6 4 Trifase 2 a caldo 1.5 1 1 1.2 2 3 4 5 6 8 10 12 1.05 Fig. 74. Caratteristiche di intervento del relè termico.
Interruttori Automatici per Motori
Come si è detto, nel telecomando di motori contat- tore e relè termico non sono in grado di proteggere se stessi e il carico da un eventuale cortocircuito che può manifestarsi nel motore o sui collegamenti intermedi. Serve, quindi, un apposito interruttore a monte (fig. 75) con caratteristica di intervento magnetico MA (12 . In Im ≤ 14 . In).
Interruttore automatico di protezione contro il cortocircuito X A Contattore Relè termico di protezione contro i sovraccarichi M
Il valore così alto della soglia magnetica è giustificato dalla presenza delle forti correnti di spunto.
I motori, inoltre, trasformano energia elettrica in meccanica portando in rotazione l'inerzia del proprio rotore e del sistema, accumulando energia cinetica, la quale è poi in grado di mantenere il movimento per un certo intervallo di tempo anche successivamente alla mancanza della tensione di rete. Durante questo intervallo, che dura alcune decine di millisecondi, il motore funziona da generatore, contribuendo ad un eventuale corrente di cortocircuito con valori efficaci iniziali di circa 6 + 8 volte la corrente nominale del motore.
Interruttori Magnetotermici per Motori
6.4 Interruttori magnetotermici per motori Gli interruttori magnetotermici per motori, detti anche salvamotori, sono dispositivi appositamente predisposti per il comando manuale e la contempo- ranea protezione dei motori. Si tratta di apparecchi tripolari con comando a tasto e sgancio libero, carat- terizzati da sganciatori termici con soglia regolabile (IT) e con intervento magnetico a soglia fissa: 12 . ITmax ≤ Im ≤14 . ITmax (CEI 60947-2)
1 3 5 11 23 X 12 24| - - 1 1 2 4 6 Fig. 76. Simbolo grafico di un interruttore magnetotermico per motore.
Come tutti gli interruttori possono essere dotati di accessori (contatti ausiliari e di allarme) e di sgan- ciatori di apertura (a lancio di corrente o a minima tensione).
Ogni costruttore fornisce tabelle per la selezione dei propri salvamotori una volta noti i dati del motore.
In tab. 6 sono riportate alcune corrispondenze per motori asincroni trifasi in categoria AC-3 (motori con rotore a gabbia, e con avvio e spegnimento durante il funzionamento).
Il valore massimo di taratura corrisponde in pratica alla corrente nominale dell'interruttore.
Tab. 6 - Selezione di salvamotori MF32 (BTicino) per motori asincroni da 400 V
| IT [A] min = max | Im [A] | P [KW] |
| 1,6 + 2,5 | 33,5 | 0,75 |
| 2,5 + 4 | 51 | 1,5 |
| 6 +10 | 138 | 4 |
| 13 - 18 | 223 | 7,5 |
| 20 :25 | 327 | 11 |
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
