La Cinematica in una Dimensione: moto uniforme e vettori in Fisica
Slide di Università sulla cinematica in una dimensione. Il Pdf, utile per lo studio della Fisica, illustra i concetti fondamentali della cinematica, il moto uniforme e le operazioni con i vettori, inclusa la somma grafica e la sottrazione, con esempi e formule.
Mostra di più22 pagine

Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
La Cinematica in una Dimensione
Moto Uniforme e Accelerato
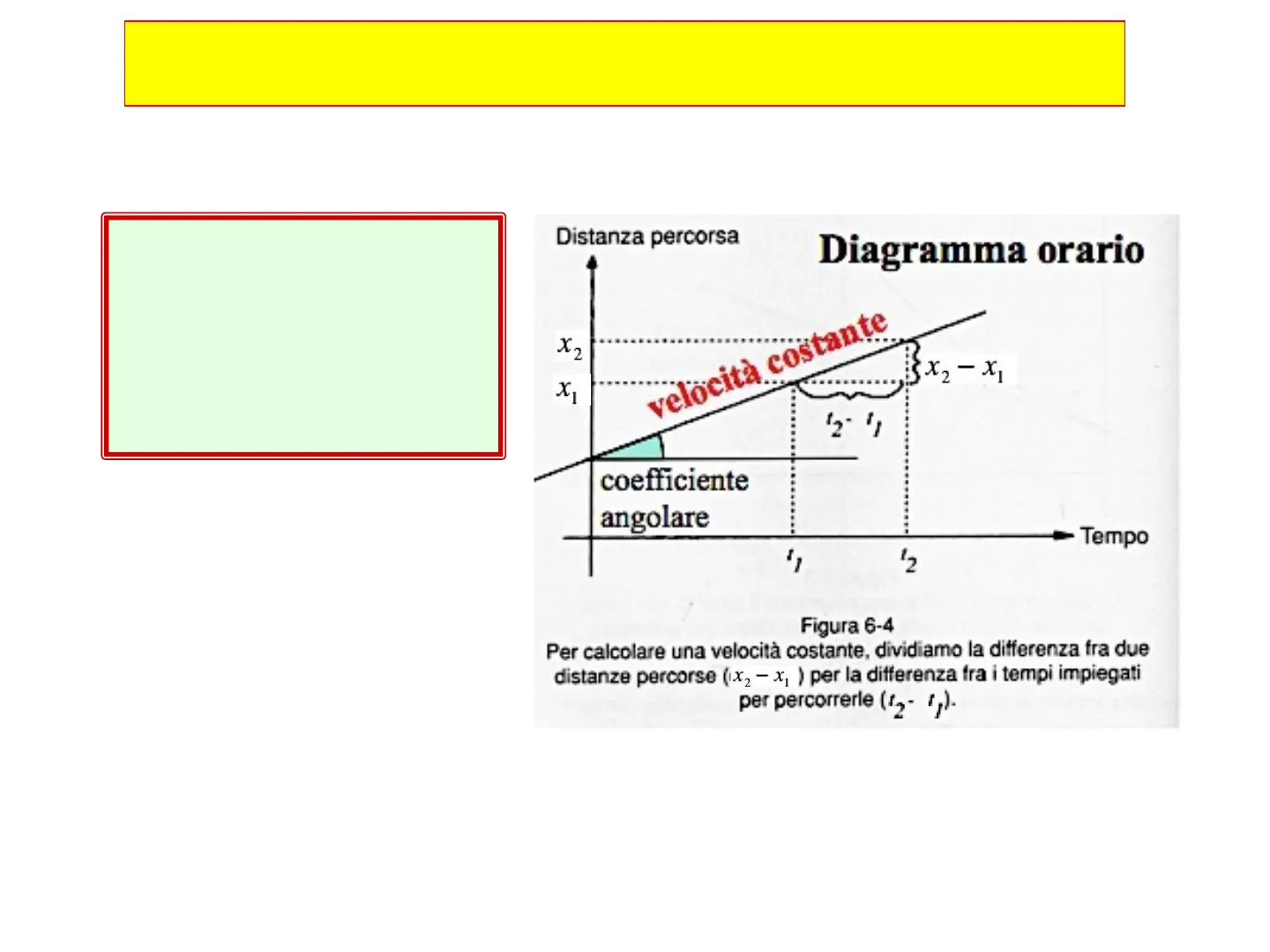
traiettoria 1D X x(to) x(t1) x(t3) x(t2) x(t4) ..... vettori spostamentoMoto uniforme Equazione del moto uniforme (V=Vo=costante, a=0) x(t) = X0 +v.t Distanza percorsa Diagramma orario velocità costant X2- X1 X1 coefficiente angolare - Tempo 12 Figura 6-4 Per calcolare una velocità costante, dividiamo la differenza fra due distanze percorse (x2 - x1 ) per la differenza fra i tempi impiegati per percorrerle (2-1).. e moto uniformemente accelerato in 1D
Velocità e Accelerazione Istantanee
Velocità e Accelerazione istantanee Ax v(t) = lim At->0 At dx dt 1v a(t) = lim At->0 At dt Equazioni del moto uniformemente accelerato (a=cost) (I) V = Vo + at (II) x= X + Vot +-at- 2 1 2 (III) v2 = vo + 2a(x- x0)
Diagramma Orario del Moto
x Diagramma orario x(t) Posizione La pendenza varia XO 1 0 (a) v Diagramma della velocità v(t) Velocità Pendenza = a vo 1 0 (b) Diagramma della accelerazione Accelerazione a(t) Pendenza = 0 t 0 . . . . . . . . . . . . . = dv = . (c)
Accelerazione di Gravità e Caduta Libera
Accelerazione di gravità nel moto di caduta libera in 1D Equazioni del moto di oggetti in caduta libera (a = - g = cost) 1 I) v = Vo - gt II) y - yo = Vot -- gt 2 III) v2 = v02-2g(y - y0) 2 y A.D. 1604 Galileo Galilei 00 Tubo pieno d'aria (a) Tubo «vuoto» (b) -. .B(v=0) 100 100 10 ↑ ひ Fisica Copyright 2006 Casa Editrice Ambrosiana 12 y = 11.5 m 10 t = 1.53 s 8 y (m) 6 4 2 0 0 0.5 1 1.5 2 2.5 3 3.5 t (s) (a) 20 15 10 5 v (m/s) t = 1.53 s 0 -5 -10 -15 -20 0 0.5 1 1.5 2 2.5 3 3.5 (b) t (s) Fisica Copyright 2006 Casa Editrice Ambrosiana
Verso la Cinematica in 2D
Rappresentazione dei Vettori
VERSO LA CINEMATICA in 2D ... + 2D P(x,y) -x ++x 0 -yI Vettori b a a+b
Grandezze Scalari e Vettoriali
Grandezze scalari e grandezze vettoriali La distanza tra Roma e Milano è di 600 km. Se parto da Roma e percorro 600 km mi troverò a Milano? NO, non è detto ... infatti, mentre la distanza tra due punti o la lunghezza di un oggetto sono completamente definite da un numero e dalla sua unità di misura, una grandezza come lo spostamento ha bisogno di ulteriori informazioni. E' facile capire che percorrendo 600 km da Roma in linea retta ci si può trovare in qualsiasi punto di una circonferenza di centro Roma e raggio 600 km: dipende dalla direzione che abbiamo scelto! Il motivo è che lo spostamento è una grandezza vettoriale, mentre la distanza è una grandezza scalare. Una grandezza scalare è completamente definita da un valore numerico (con la sua unità di misura). Ecco alcuni esempi di scalari: ·distanza = 600 km ·massa = 250 kg ·intervallo di tempo = 23 s ·energia cinetica = 40 J (Joule, che come vedremo è l'unità di misura dell'energia nel SI) La somma di grandezze scalari (omogenee) si esegue come la normale somma tra numeri reali.Grandezze scalari e grandezze vettoriali Per spostarmi correttamente da Roma a Milano ho bisogno di ulteriori informazioni, espresse da una grandezza vettoriale Generalmente le tre informazioni che individuano una grandezza vettoriale (e dunque il vettore ad essa corrispondente) sono: * l'intensità o modulo (un numero reale con unità di misura) * la direzione (l'insieme delle rette parallele al vettore dato) * il verso (uno dei due versi di percorrenza, data una direzione) I vettori, utile strumento matematico per trattare queste grandezze, sono rappresentati da segmenti orientati che visualizzano in modo grafico le tre informazioni. Il punto indicato dalla freccia si chiama punta del vettore, mentre il punto iniziale si chiama coda, o anche punto di applicazione del vettore. Un vettore si indica ad esempio con v mentre il suo modulo si scrive v o semplicemente v . Punta Coda o Punto di Applicazione Ecco alcuni esempi di grandezze vettoriali: ·Spazio percorso = 600 km in direzione Nord-Sud, verso Nord ·Spazio percorso = 20 m verso Nord-Est · Velocità = 50 km/h verso Sud ·Forza = 100 N in direzione verticale, verso l'alto
Operazioni con Grandezze Vettoriali
Operazioni con le grandezze vettoriali Scala per la velocità: 1 cm = 90 km/h La freccia che rappresenta un vettore v è ovviamente sempre disegnata in modo tale da indicarne la direzione e il verso, mentre spesso la lunghezza della freccia è proporzionale al modulo del vettore (vedi ad esempio i vettori velocità disegnati in figura). La somma di grandezze vettoriali (omogenee) non si esegue in generale come la normale somma tra numeri reali ma necessita di un metodo specifico per ottenere il vettore risultante. Risultante = 14 km (est) 0 8 km 6 km x (km) est (a) Risultante = 2 km (est) 6 km - x (km) 0 8 km est In realtà si può usare la semplice aritmetica solo per sommare alge- bricamente vettori che abbiano la stessa direzione, come accade quando si lavora, come abbiamo fatto finora, su sistemi di riferimento ad una dimensione: (b)
Somma di Vettori in Due Dimensioni
Somma di vettori in 2 dimensioni Le cose cambiano, invece, se si lavora in sistemi di riferimento a due dimensioni e se i due vettori da sommare (10 Km e 5 Km) non giacciono lungo la stessa retta, come in figura. y (km) | nord 6 + Spostamento risultante 1 4 1 DR=D1 + D2 D2 2 angolo retto D x (km) ovest 0 2 4 6 8 10 vettori da sommare sud Pitagora (Samo, 580 a.C. circa - Metaponto, 495 a.C. circa) In questo caso i vettori da sommare sono ortogonali, ossia formano un angolo retto, e il modulo del vettore risultante, che rappresenta l'ipotenusa del triangolo rettangolo che ha per cateti i due vettori originali, può dunque essere calcolato con il teorema di Pitagora: C2 C A A2 B B2 2 C2 = B2 + A2 -> C=VB2 + A2 estSomma di vettori in 2 dimensioni Le cose cambiano, invece, se si lavora in sistemi di riferimento a due dimensioni e se i due vettori da sommare (10 Km e 5 Km) non giacciono lungo la stessa retta, come in figura. y (km) | nord 6 + Spostamento risultante 1 4 1 DR=D1 + D2 D2 2 angolo retto D x (km) ovest 0 2 4 6 8 10 vettori da sommare sud Pitagora (Samo, 580 a.C. circa - Metaponto, 495 a.C. circa) In questo caso i vettori da sommare sono ortogonali, ossia formano un angolo retto, e il modulo del vettore risultante, che rappresenta l'ipotenusa del triangolo rettangolo che ha per cateti i due vettori originali, può dunque essere calcolato con il teorema di Pitagora: DR =D2 + D2= (10.0km)2 + (5.0km)2 = 2 = 1125km =11.2km C2 C A A2 B B2 2 C2 = B2 + A2 -> C=VB2 + A2 estSomma di vettori in 2 dimensioni Le cose cambiano, invece, se si lavora in sistemi di riferimento a due dimensioni e se i due vettori da sommare (10 Km e 5 Km) non giacciono lungo la stessa retta, come in figura. y (km) | nord 6 + Spostamento risultante 1 4 1 DR=D1 + D2 B2 2 x (km) ovest 0 2 4 6 8 10 est sud In questo caso i vettori da sommare sono ortogonali, ossia formano un angolo retto, e il modulo del vettore risultante, che rappresenta l'ipotenusa del triangolo rettangolo che ha per cateti i due vettori originali, può dunque essere calcolato con il teorema di Pitagora: DR =D2 +D2 = (10.0km)2 + (5.0km)2 = = 125km2 = 11.2km Notiamo anche che il vettore risultante DR forma un certo angolo 0 con l'asse x positivo (vedremo dopo come ricavarlo). Importante: osserviamo che il modulo del vettore risultante ottenuto con la somma vettoriale appena vista è minore della somma dei moduli dei due vettori sommati (pari a 15km): è questa la famosa "disuguaglianza triangolare" (DR
Somma Grafica di Vettori
Somma grafica di vettori in 2 dimensioni L'esempio appena visto suggerisce una regola generale per l'addizione grafica di due vettori, indipendentemente dall'angolo che formano. E' il cosiddetto metodo coda-punta per la somma vettoriale: 1) In un grafico si traccino in scala i due vettori da sommare, S, ed S2, ponendo la coda del secondo sulla punta del primo (importante: è possibile traslare qualunque vettore sul piano, spostando il suo punto di applicazione, cioè la sua coda, ma senza ruotarlo, cioè senza cambiarne modulo, direzione e verso) s2 s1Somma grafica di vettori in 2 dimensioni L'esempio appena visto suggerisce una regola generale per l'addizione grafica di due vettori, indipendentemente dall'angolo che formano. E' il cosiddetto metodo coda-punta per la somma vettoriale: 1) In un grafico si traccino in scala i due vettori da sommare, S, ed S2, ponendo la coda del secondo sulla punta del primo (importante: è possibile traslare qualunque vettore sul piano, spostando il suo punto di applicazione, cioè la sua coda, ma senza ruotarlo, cioè senza cambiarne modulo, direzione e verso) 2) Il vettore risultante dalla somma oriale S1 + S2 sarà un vettore (in rosso) che ha la coda sulla coda del primo e la punta sulla punta del secondo .; s1 + s2 s2 s2 s1 s1 Non è importante, quando si usa questo metodo, in che ordine vengono sommati i vettori, cioè in generale si ha: S + S = S2 + S (proprietà commutativa della somma vettoriale) Il metodo coda-punta può essere facilmente esteso anche a tre o più vettori, ed è utile ad esempio quando si tratta di sommare spostamenti successivi: vì VI + v> + = = v2 1 v 3Somma grafica di vettori in 2 dimensioni Un altro metodo per sommare graficamente i vettori è il cosiddetto metodo del parallelogramma (b), completamente equivalente al metodo coda-punta (a). In esso i due vettori vengono tracciati a partire da una stessa origine (ossia facendo coincidere i loro punti di applicazione), dopodiché si costruisce il parallelogramma che ha questi vettori come lati consecutivi: il vettore risultante sarà dato dalla diagonale del parallelogramma tracciata a partire dalla comune origine. Questo metodo è utile quando si tratta di sommare vettori che hanno già lo stesso punto di applicazione (ad es. nel caso di forze applicate ad uno stesso corpo, come vedremo più avanti): VR R + V2 = (a) Coda-punta 1 VR + = (b) Parallelogramma 1 1 1 origine comune 7 T / + V2 ERRATO 1 1 5 1 1 V 1 (c) Sbagliato V2 1
Altre Operazioni con i Vettori
Altre operazioni con i vettori Vettore opposto Il negativo (o opposto) di un vettore è un vettore che ha la stessa lunghezza (stesso modulo), la stessa direzione, ma verso opposto: vettore originale Moltiplicazione di un vettore per uno scalare La moltiplicazione di un vettore per uno scalare b dà un vettore il cui modulo è dato dal prodotto di b per il modulo del primo vettore, che ha la stessa direzione e che ha lo stesso verso se b è positivo, verso opposto se b è negativo: vettore originale V2= 1.5V V3 =- 2.0 V Sottrazione di vettori La differenza tra due vettori è definita come la somma del primo vettore con l'opposto del secondo: V - V = V2 + = V2- Vi 1 V2
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
