Controllo Motorio e Riabilitazione: Riflesso Vestibolo-Oculomotore
Documento del Centro Europeo di Formazione e Ricerca in Ingegneria Sismica su Controllo Motorio e Riabilitazione. Il Pdf esplora il riflesso vestibolo-oculomotore (VOR), i movimenti oculari e il sistema vestibolare, con spiegazioni dettagliate e formule, utile per lo studio della Biologia a livello universitario.
Mostra di più21 pagine

Visualizza gratis il Pdf completo
Registrati per accedere all’intero documento e trasformarlo con l’AI.
Anteprima
Controllo Motorio e Riabilitazione
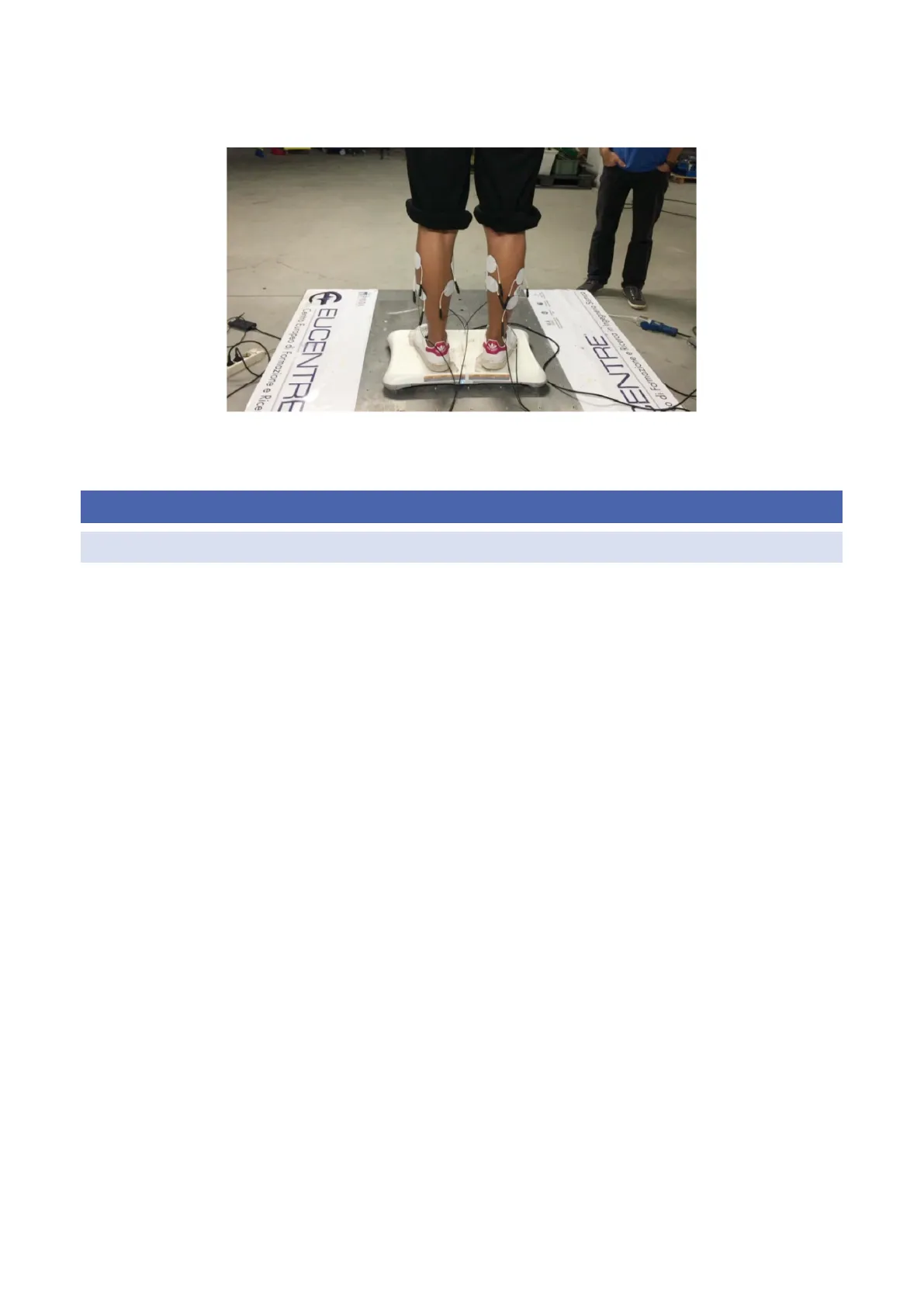
Successivamente l'elettrostimolazione è stata abbinata alla traslazione della piattaforma. Centro Europeo di Formazione e Rice GEUCENTRE 52914 ZENTRE o di Formazione e Ricerca in Ingegneno Samo L'idea complessiva dell'esperimento è quella di poter migliorare la capacità di mantenere l'equilibrio e la stabilità negli anziani per ridurre il rischio di caduta.
Il Riflesso Vestibolo-Oculomotore (VOR)
Aspetti Sensoriali e Motori del VOR
La nostra capacità di percepire in modo affidabile l'ambiente mentre ci muoviamo al suo interno dipende dai riflessi vestibolo-oculomotori e optocinetici, che agiscono per stabilizzare l'immagine del mondo visto sulla retina. Tale stabilizzazione è realizzata principalmente sulla base delle informazioni sensoriali vestibolari e visive utilizzate dal sistema nervoso centrale produrre movimenti oculari che sono compensativi per i movimenti della testa, e quindi mantenere lo sguardo stabile nello spazio.
L'obiettivo del controllo dei movimenti oculari è quello del controllo dello sguardo (gaze); la posizione dello sguardo (gaze position) può essere vista come somma dell'orientamento della testa e della posizione degli occhi (sistema di puntamento mobile su una piattaforma mobile): gaze position = head position + eye position Per guardare un oggetto di interesse muoviamo lo sguardo facendo in modo che l'immagine cada sulla fovea; lì si trova la più alta densità di fotorecettori a cono ed è quindi la zona di maggiore acuità visiva. Per essere in grado di vedere correttamente nel nostro ambiente mentre ci muoviamo al suo interno, dobbiamo essere in grado di stabilizzare le immagini degli oggetti di interesse sulla retina; anche pochi gradi/s di slittamento retinico rendono la visione poco nitida. Un sintomo clinico della disfunzione di questi meccanismi è chiamato oscillopsia (il mondo circostante non è stabile).
I movimenti oculari sono un potentissimo strumento a disposizione dei neurologi per la diagnosi di patologie neurologiche e psichiatriche; la circuiteria nervosa che li media e gli ingressi sensoriali sono molto ben conosciuti, sia dal punto di vista anatomico che da quello fisiologico. Nello studio del controllo motorio da un punto di vista computazionale, sono utili per la comprensione di diversi aspetti: predizione, memoria, apprendimento, adattamento, plasticità o gratificazione.
I movimenti oculari sono di diverso tipo:
- Movimenti saccadici: movimenti più veloci che consentono di riorientare lo sguardo verso un punto di interesse e durano poche decine di millisecondi; sono prodotti da un sottosistema di neuroni che si trovano nel ponte e che producono frequenze di scarica molto elevate (burst neurons). Questi movimenti sono finalizzati all'orientamento della fovea.
62Controllo Motorio e Riabilitazione | Michela Ferrari
- Movimenti di inseguimento lento.
- Movimenti di origine vestibolare: movimenti volti alla stabilizzazione dello sguardo durante il movimento della testa, prodotti da informazione generata dal sistema vestibolare.
- Movimenti di origine optocinetica: hanno come obiettivo la stabilizzazione della retina ed è la retina stessa che fa da trasduttore di retroazione.
- Movimenti di vergenza: movimenti non coniugati in cui gli occhi si muovono in direzione opposta per cambiare la profondità del punto di fissazione.
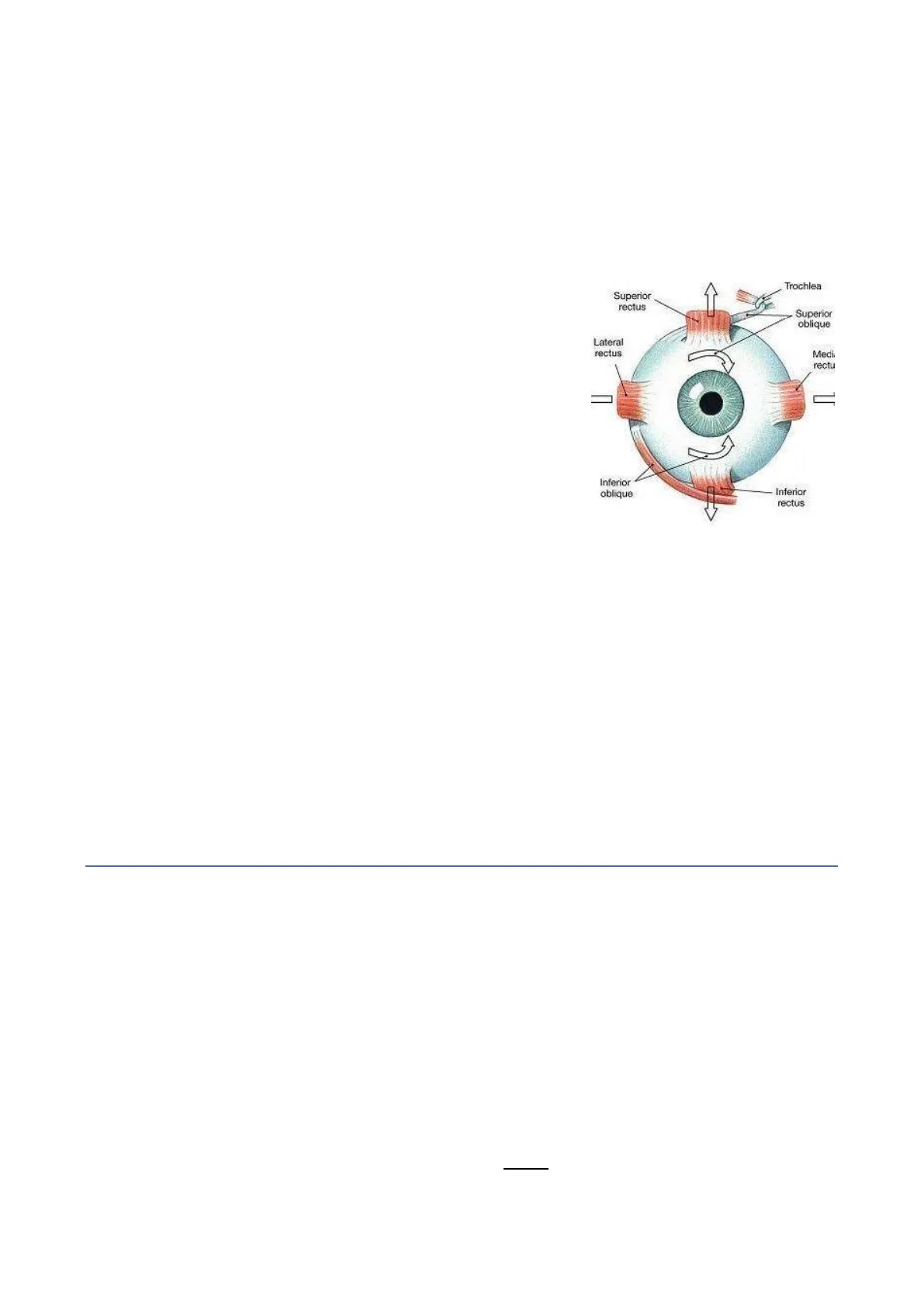
Gli attuatori del sistema sono i muscoli extra oculari; ci sono tre gradi di libertà per i movimenti degli occhi: orizzontali, verticali e torsionali in cui l'occhio ruota attorno all'asse visivo. In prima approssimazione si può dire che ogni grado di libertà è controllato da una coppia di muscoli:
- movimenti orizzontali: muscoli retti orizzontali (retto mediale e retto laterale);
- movimenti verticali: muscoli retti verticali (retto superiore e retto inferiore);
- movimenti obliqui: muscoli obliqui (inferiore e superiore).
Trochlea Superior rectus Superior oblique Lateral rectus Medi: rectu Inferior oblique Inferior rectus Per come si innestano i muscoli obliqui nell'occhio, la loro contrazione causa sia una rotazione che un'elevazione o un abbassamento dello sguardo.
I sistemi fisiologici sono tipicamente dinamici, poiché il loro output non dipende solo dall'input attuale ma anche dalla sua storia passata e possono quindi essere descritti matematicamente con equazioni differenziali. Il VOR è uno di questi sistemi dinamici fisiologici.
Nel VOR l'input del sistema è l'accelerazione angolare della testa in funzione del tempo Ön (t) e il suo output è la posizione dell'occhio, anch'essa in funzione del tempo 0E(t). Un modello ingresso-uscita costruito solo osservando queste due grandezze e senza dettagliare il comportamento dei componenti interni coinvolti in questo processo che trasforma l'accelerazione della testa nella posizione degli occhi, tuttavia, non sarebbe informativo per la ricerca neuroscientifica. Sarebbe più utile comprendere i componenti o i sottoprocessi, ciascuno dei quali può essere oggetto di un modello fisiologico, e questi possono poi essere combinati in un modello del sistema complessivo.
Inizieremo considerando il funzionamento plant oculomotore, poi quello dei canali semicircolari e, infine, della porzione centrale che si trova tra i due.
Plant Oculomotore
Dal punto di vista ingegneristico del controllo, il plant oculomotore è costituito dai sei muscoli extra oculari (attuatori), dal bulbo oculare (sistema controllato) e dai tessuti molli che circondano, proteggono e consentono la rotazione dell'occhio. Ognuno dei tre gradi di libertà dell'occhio è controllato da un paio di muscoli. Tutti i comandi neurali che guidano i movimenti oculari devono controllare il bulbo oculare attraverso la contrazione dei muscoli extra oculari (EOM). I tessuti passivi orbitali contribuiscono alla viscosità opposta alla velocità oculare, mentre il muscolo antagonista fornisce una forza elastica tale tende a riportare gli occhi nella loro posizione centrale.
Questi termini sono stati considerati in un primo studio di David Robinson (1964) basato su esperimenti meccanici sui movimenti saccadici umani, mettendo in relazione il movimento dell'occhio con le forze applicate esternamente o prodotte dai muscoli. Una approssimazione del primo ordine della relazione tra la forza netta dei muscoli (F) e la posizione degli occhi (0E) è data da: F(t) = KOE(t) + R- deE(t) dt
63Controllo Motorio e Riabilitazione | Michela Ferrari dove K e R sono i coefficienti di elasticità e viscosità. La presenza di un termine elastico indica che c'è una forza elastica proporzionale alla deviazione dell'occhio dalla posizione di riposo; se non ci sono patologie, la posizione di riposo corrisponde alla posizione in cui i muscoli sono rilassati e l'occhio guarda dritto davanti a sé. Quando ci si sposta dalla posizione centrale un muscolo si contrae e l'altro viene stirato; la forza elastica richiama l'occhio verso il centro. La forza viscosa è maggiore quanto è più rapido il movimento dell'occhio (molto rilevante nei movimenti saccadici perché sono veloci).
Le registrazioni sui singoli motoneuroni oculari hanno mostrato che la forza esercitata è proporzionale alla velocità di scarica. Per questo motivo l'ingresso del plant può essere la velocità di scarica istantanea dei motoneuroni (R(t)) in termini di picchi/s, mentre l'uscita del sistema è la posizione istantanea dell'occhio nell'orbita (0E(t)). In effetti, le registrazioni dell'attività dei singoli neuroni nei nuclei motori oculari nella scimmia vigile mostrano una simile approssimazione del primo ordine della relazione tra la velocità di scarica e la posizione dell'occhio come: R(t) = keE(t) +r. dt deF(t) + ro dove kOF(t) rappresenta la forza necessaria per vincere la resistenza elastica dei muscoli e r de E(t) la forza necessaria per vincere le forze di attrito viscoso delle fibre muscolari e dei bulbi nell'orbita; ro rappresenta la frequenza di scarica a riposo. Applicando la trasformata di Laplace si ottiene l'equazione R(s) = k0E(s) + sr0E(s), che può essere scritta come funzione di trasferimento del plant: PLANT (s) = R(s) 1 k + sr 0E(s) 1/k 1 + sTe Dove Te = - = 240 ms è la costante di tempo del sistema che è stata misurata sperimentalmente da Robinson. La funzione di trasferimento risultante corrisponde ad un filtro passa basso con un polo e nessuno zero (in figura la risposta ad un gradino di 10° va a regime in circa 1 s). Questa è un'approssimazione del primo ordine della funzione di trasferimento del plant, che considereremo per esemplificare il suo comportamento, poiché comprende i movimenti oculari vestibolari che si verificano più naturalmente.
10 Bode Diagram 0 9 -5 8 -10 7 Eye position (deg) 6 =0.66 Hz 5 -30 0 3 Phase (deg) 1 90 0 0 0.2 0.4 0.6 0.8 1 1.2 1.4 10 10° 10 10 Time (s) Frequency (rad/sec) Sebbene le proprietà del plant possano essere descritte in modo affidabile da questo filtro passa basso del primo ordine per la maggior parte dei movimenti oculari vestibolari, per movimenti con componenti a frequenza più alta (es: saccadi) è necessario sviluppare un modello di ordine superiore. In questo caso, nell'equazione differenziale che descrive l'effetto di una forza applicata all'occhio, possiamo tenere in considerazione il momento di inerzia del bulbo oculare e un ulteriore termine dipendente dall'accelerazione angolare dell'occhio. F(t) = KOE(t) + R dt deF(t) + M d20E(t) dt2 dove M rappresenta il momento di inerzia.
64
Magnitude (dB) -15 20 1/Te = 4.16 rad/s 05 4 -45 2-Controllo Motorio e Riabilitazione | Michela Ferrari Seguendo gli stessi passaggi di prima, possiamo scrivere la relazione in termini di attività di scarica dei motoneuroni e ottenere una funzione di trasferimento con due poli. R(t) =k0E(t) +r deF(t) dt + m- d20E(t) dt2 0F(s) 1/k R(s) (k + sr + s2m) 1 (1 + Te1S) (1 + Te2S) (1 +Te1S)(1 +Te2S) K Dove Te1 = r/k = 180 ms (termine dominante) e Te2 = m/r = 16 ms.
Sistema Vestibolare
Il riflesso vestibolo oculomotore si occupa della stabilizzazione visiva legata ai movimenti della testa e impiega il segnale fornito dal sistema vestibolare per stabilizzare l'immagine visiva dell'ambiente esterno.
Il VOR causa la rotazione degli occhi in direzione contraria a quella del capo, ad una velocità angolare prossima a quella del capo.
Una rotazione della testa in senso orario (verso destra) eccita il sensore di destra che, tramite il primo afferente vestibolare, porta l'informazione ai nuclei vestibolari nel tronco encefalico. I nuclei vestibolari proiettano al nucleo oculomotore che a sua volta comanda la contrazione del retto laterale sinistro e mediale destro. In questo modo gli occhi ruotano verso sinistra.
M. rectus medialis M. rectus lateralis 4 ms N. oculomotorius (II) Formatio reticularis N. abducens (VI) C 1 ms Interneurons Nucleus abducens 1 ms Nucleus vestibularis Inhibition N. vestibulocochlearis (VIII) Excitation N. vestibularis 1 ms Left Ductus semicircularis lateralis Right La via diretta consta di un classico arco riflesso di tre neuroni con una latenza molto bassa (< 10 ms); l'elemento che introduce il maggior ritardo è il muscolo.
Recettori del Sistema Vestibolare
Le informazioni di origine vestibolare sono fondamentali per il mantenimento della postura, dell'equilibrio e della stabilizzazione visiva. Il sistema vestibolare ha dei recettori nell'orecchio interno che si trovano nel labirinto vestibolare; è presente un labirinto per lato e lo stesso organo è anche legato al sistema uditivo.
Il singolo labirinto è composto da tre canali semicircolari (CSC) perpendicolari tra loro: orizzontale, anteriore e posteriore. È presente anche un accelerometro lineare 3D formato da due organi chiamati otoliti: utricolo e sacculo. La trasduzione del movimento del capo nei canali semicircolari e negli otoliti è realizzata da cellule ciliate; la deflessione meccanica delle ciglia causa una variazione del potenziale di membrana.
Semicircular Canals Hair Cell Utricle Saccule 65
Non hai trovato quello che cercavi?
Esplora altri argomenti nella Algor library o crea direttamente i tuoi materiali con l’AI.
